




EPFL Xplore
EPFL Xplore is a student-led Robotics Space association counting over 100 members.
We develop a Mars-like rover every year to compete in the international European Rover Challenge: we design, manufacture and test our home-made rover, drone, robotic arm, PCBs and power supply, alongside our implementations of autonomous Navigation and Object Recognition and Machine Learning for arm control.

This year, we have expanded our reach to two new poles: the Xplore Rover Challenge and Xplore Research.
Xplore Rover Challenge is our Education pole; it is an educational initiative where our expert coaches guide teams of 4 students through the development of micro-rovers, to then compete against one another in our very own internal rover competition. This initiative specifically targets first and second year Bachelor students with no prior experience in Robotics.
Xplore Research, on the other hand, is our R&D pole; it is an initiative oriented toward new research projects (Legged Robot, Voice Recognition for Rover Control, Unknown Object Detection, Plastic Recycling for 3D-printers) in collaboration with EPFL laboratories and companies in industry. Under this pole also reside joint internships between EPFL Xplore and external companies; this year, for example, we have two ongoing joint internships on the topics of formal verification and design of a digital twin of the rover, respectively.
From the rover, to the drone, to the legged robot, to the machine for plastic recycling for 3D-printers, electronic components are everywhere.
The projects that we are presenting to you are in relation to our rover.
The Electronics sub-system of the rover is in charge of providing the necessary information to the other subsystems, like data coming from various sensors, as well as a stable power source to allow them to operate safely.
This subsystem is divided into two poles:
The first one is low-power electronics and describes several custom-made STM32 micro-controller based motherboards that have multiple predefined universal ports for hot swapping smaller sensor PCBs. These sensor boards are also custom-made and contain the sensors required by the other subsystems such as the Robotic Arm, the Science module and the Navigation module. This includes sensors such as ADCs, IMUs, soil sensors (NPK, PH, Temperature), voltage sensors, etc. Additionally, these motherboards can also be interfaced with a dedicated dual-channel switching regulator, which provides protection against over-voltage, over-current, reverse polarity, ESD and short-circuit events. The motherboards communicate with each other through an FD-CAN bus, which is made fully redundant by connecting each node to two separate CAN buses.
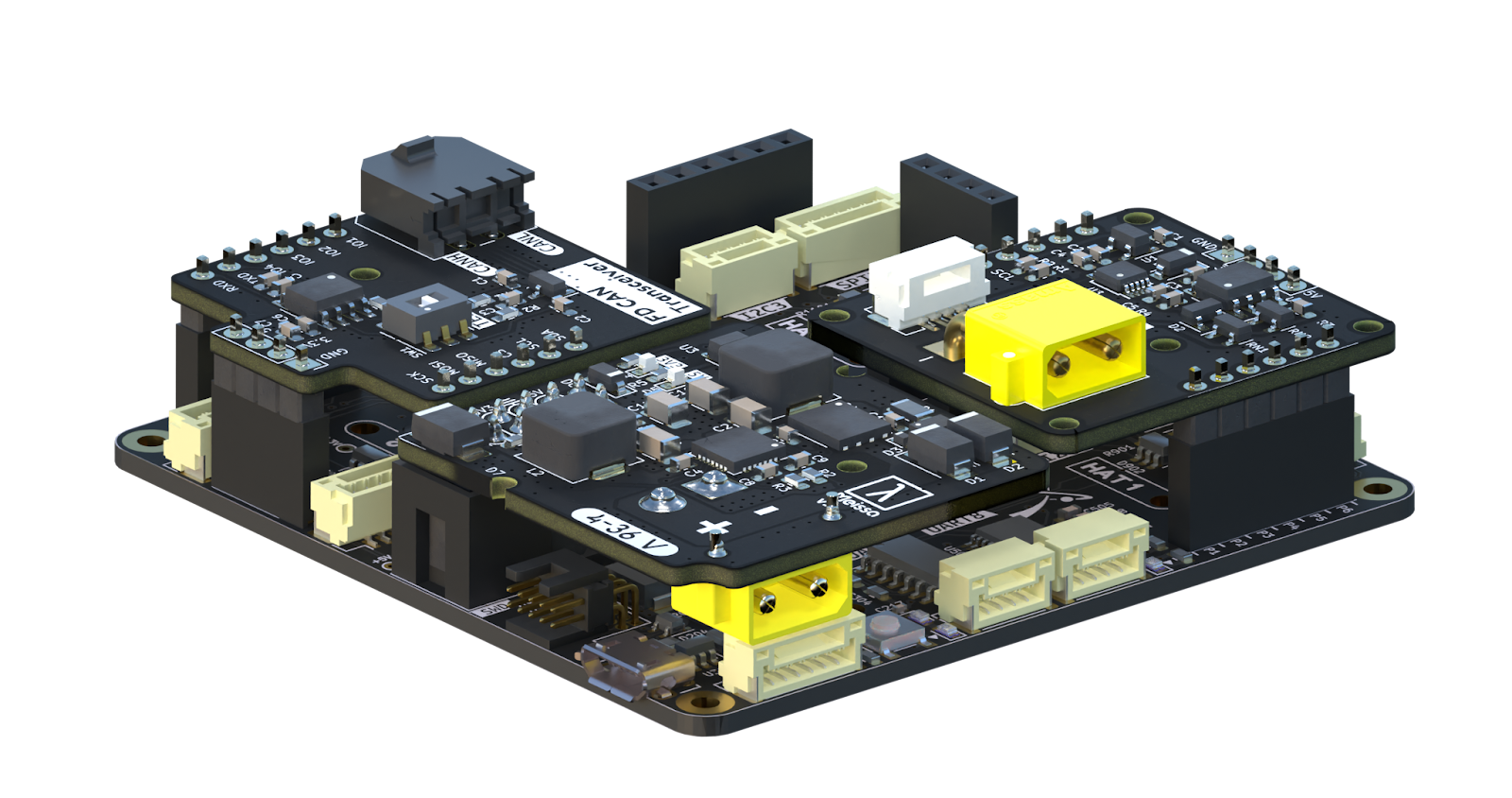
The second pole is the power distribution system for the entire rover which consists of the battery, BMS and voltage regulation. The output of the battery has to be stepped down to several predefined and regulated voltages to accommodate a myriad of PCBs and devices on the rover. Therefore, the power distribution PCB can have a large amount of current and power passing through it at any given time and as such must be carefully sized/layed out to avoid burning and shorts which can potentially be quite dangerous.
In terms of environmental protection, we are currently exploring humidity protection solutions through conformal coatings. Both of the main poles also have external flash memories which are used to store firmware as well as data collected during missions.
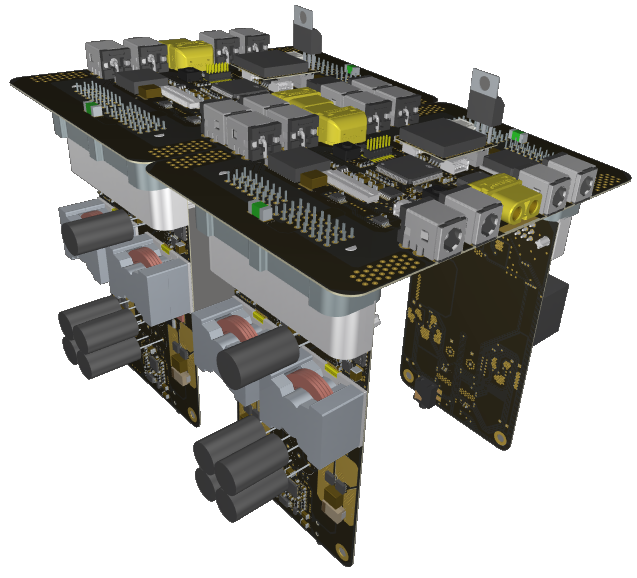
Additionally to the aforementioned projects, the Xplore Research pole centered around the legged robot also houses multiple custom PCBs. The one that is currently being developed is a custom, high-performance BLDC controller. It is made to be tightly integrated inside of our custom frameless motor actuator. The motor controller provides interfaces with hall sensors, incremental encoders, absolute encoders, external fans and multiple external sensors.
The support of PCBWay would bring great benefit to our team. EPFL Xplore aims to push the boundaries of Space Robotics by developing Mars-like rovers and drones, therefore designing and manufacturing custom parts such as PCBs. Due to our tight timeline of a single academic year for every new rover and drone iteration, we currently face time and budget challenges when it comes to prototyping. PCBWay’s support would allow us to not only to accelerate the prototyping phase, but also to expand our knowledge and skills in the field.
PCBWay would enable us to get one step closer to our goal of helping raise the next generation of top-tier engineers.
- Comments(0)
- Likes(1)












