Summary: Have you ever thought about how robots and other industrial grippers sense? Do you know what makes them have such ability? If you are green with such information don’t look elsewhere. This article will enlighten you about one of the robotics and industrial gripper sensors known as tactile sensors.
Advancement in technology in recent years has placed tactile sensing as one of the key features that have implemented more complex operations and tasks in industrial and commercial robotic systems. Such tasks involve manipulation and grasping of elements in the area of application. The technology of tactile sensing has also been introduced into the market of robot grippers that can estimate the features of the object to be gripped. Remember a good robot must be equipped with a good sense of forces of interaction and the contact locations for it to have the powers to co-manipulate and cooperate with the task efficiently without damaging it or causing accidents. Such crucial information can be achieved through proper direct measurements through the use of an artificial touch of the senses. This is made possible through the use of tactile sensors plus other independent sensors. In this article we are going to lay down relevant information about the tactile sensor, what it is, various types, how it works and their circuit diagram, tactile sensors in robotics, application, and benefits of the tactile sensors.
The Tactile Sensor Definition
The tactile sensor can be defined as a measurement and sensing device that collects and utilize incoming information as it interacts with its surrounding through touching. This type of sensor tries to imitate humans’ touch sense.
Figure 1: Robot Gripper with Tactile Sensors Courtesy of Pixabay
The tactile sensor is created to adapt the kinesthetic and cutaneous touch senses in humans. The cutaneous sense is involved in the detection of stimuli that originates from pain, temperature, and mechanical stimulation while the kinesthetic touch plays a role in receiving sensed inputs from joints, tendons, and muscle receptors.
Tactile sensor development and implementation are based on providing tactile or touch sensing ability for intelligent robots and tele-operational manipulators. They act based on the normal force when applied to the tactile pixels which mesmerizes the control force and the tactile images to recognize the object. Generation of mesmerizing information to detect and determine the object is not easy and hence the sensor has to involve three-dimensional techniques. Below is the circuit diagram for the three-dimensional tactile sensor.
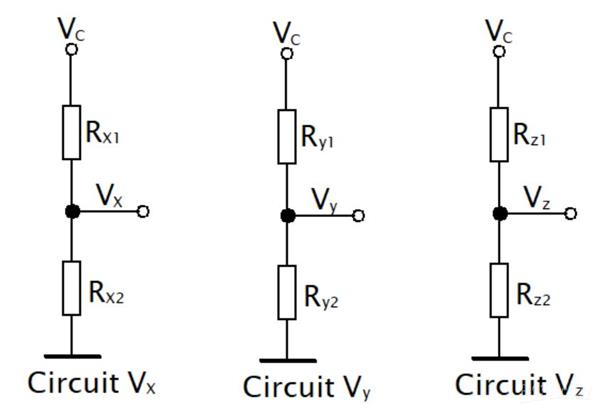
Figure 2: Tactile Sensor Circuit Diagram Courtesy of Simon Mugo
Below is a well-introduced discussion of some of the existing tactile sensors.
Torque/ Force Sensor
Torque sensors also referred to as force sensors are well combined with tactile arrays to help in controlling force. The type of sensors senses the load in any area of use such as the manipulator’s distal link and skin sensors. Skin sensor in general has an accurate measurement of force when operating at a higher bandwidth. If you generally define the manipulator’s link, then assume the signal contact, you can use the force sensor which determines vital information about moments and force location in an operation known as intrinsic tactile sensing.
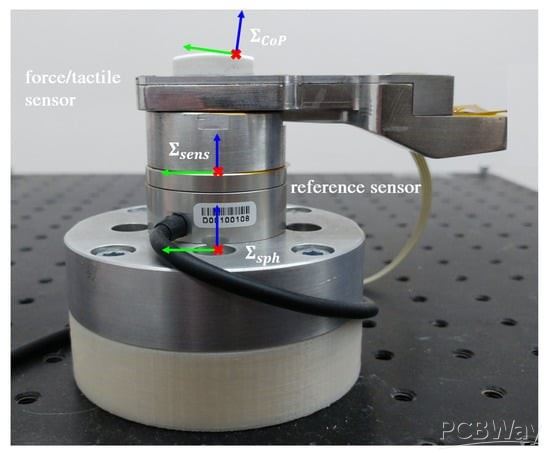
Figure 3: Touch Sensor Calibration Connection Courtesy of MDPI
Piezoelectric Tactile Sensor
Piezoelectric is an effect where electricity is generated across a given sensing element or component when subjected to pressure. This generation of the voltage is said to be proportional to the pressure applied. The piezoelectric effect is the mechanism employed by the piezoelectric tactile sensor. Such sensors are durable and operate under a dynamic range. The sensor is good for the measurement of pressure.
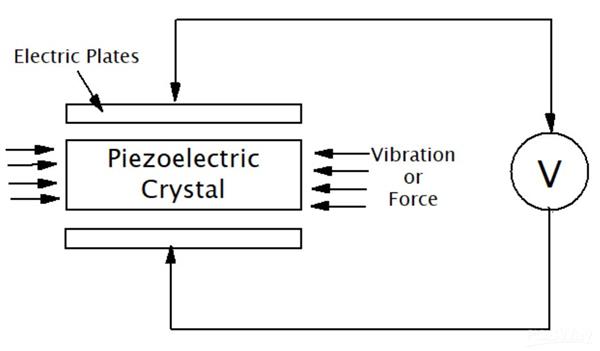
Figure 4: Piezoelectric Tactile Sensor Courtesy of Simon Mugo
Magnetic Tactile Sensor
This type of sensor is operated through two methods that are:
The sensor has the advantage of very high sensitivity and zero mechanical hystereses.
Resistive Tactile Sensor
This sensor works under the principle of electrical resistance changes that occur between the electrode and the polymer conductor. This is the most widely used type of tactile sensor. On applying pressure on the sensor, the conductive material resistance changes, and this resistance is measured. The sensors have high durability and a very good tolerance to overload.
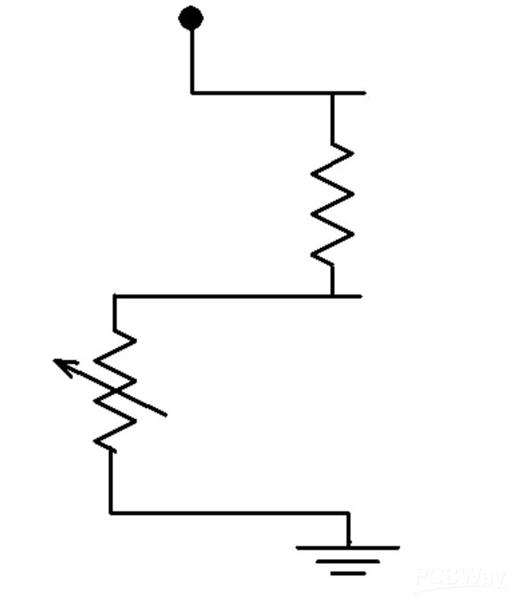
Figure 5: Circuit of a Resistive Tactile Sensor Courtesy of Simon Mugo
Optical Tactile Sensor
They are categorized into extrinsic and intrinsic optical tactile sensors. They make use of the light intensity modulation principle where an obstacle is placed to block or unblock the path of light. They are immune to electromagnetic interference and high resolution is their advantage over others. The low density of connecting cables is required and in other applications, it is operated remotely.
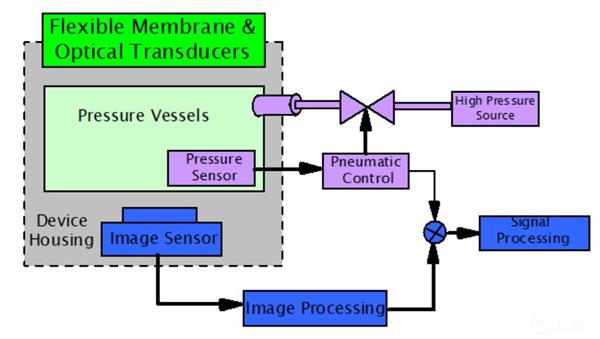
Figure 6: Optical Tactile Sensor Incorporated with Pneumatic Actuation Courtesy of Simon Mugo
Capacitive Tactile Sensor
This type of tactile sensor works through the principle of capacitance change between two capacitor electrodes. It measures the capacitance which varies depending on the pressure applied to the capacitor. Remember the capacitor capacitance is related to the parallel plate surface area and their separation. The load on the capacitor determines the capacitance. The sensor has the advantage of a wider dynamic range and linear response.

Figure 7: Capacitive Tactile Sensor Simple Diagram Courtesy of Simon Mugo
Tactile sensors find use in the area of robotics. Here let us focus on the NASA robotics tactile sensors below:
They make use of these sensors in the area of planetary exploration. These sensors are major in NASA’s international space station to aid humans during the repair process in a hostile environment.
Tactile sensors are applied in:
For the functional test of a simple tactile sensor test, we are going to make use of the Proteus EDA tool and test how such sensors behave,
Components Required
Touchpad
BC547 Transistor
Resistors 10k, 100k, and 330R
555 Timer
Capacitors 10n and 10u
LED
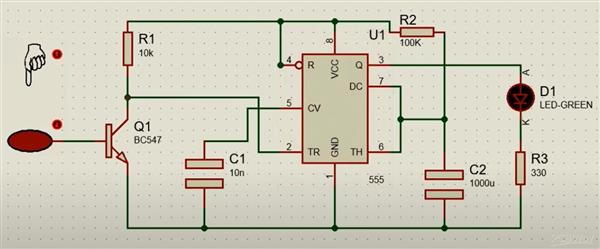
For a well understanding of how the circuit above works and how it can be simulated on the Proteus EDA tool, check out my YouTube channel.
The focus on tactile sensors is another move that will contribute immensely to the growth of robotics and industrial manipulators. Better robots with touch sensing capability are achieved through the use of such sensors. Robotic grippers adapting this technology ensures the safety of the objects being gripped. The tactile sensor used comes with the advantage of ensuring that the grippers can know the exact force that should be exerted on the grasped object without damaging it. Several sectors such as robotics, security, computer, and mobile phones have benefited a lot from this technology where several types of tactile sensors such as capacitive, piezoelectric, resistive, magnetic, and force tactile sensors have been found useful.
Most tactile sensors are manufactured in board forms where you design circuits using PCB EDA tools, make the PCB Layout, then generate necessary fabrication files such as the Gerber files, BOM files, pick and place files, and drill files then you share with your favorite manufacturer. For, I have always relied on PCBWay to fabricate such files due to their quick response, perfect end product, and timely delivery.

|
Proteus 8 |
|

|
KiCADKicad
|




