




Building a servo driven 6-Axis Robot Arm
Project Context
The project was started out of my own interest and will now be finished in the context of my semester thesis at the Technical University of Munich - where I am studying Robotics.
The project involves the development and construction of a six-axis robot. The development includes the layout/calculation, the design as well as the construction
and manufacturing of the mechanics and electronics of the robot. The design is developed
from scratch.
Descript_ion
The basic structure of the robot consists of an aluminum construction (all supporting components),
which is enclosed with 3D printed covers. To achieve the necessary transmission
ratio for the drives of the axes, two-stage synchronous belt drives are used. The axes are
driven by outrunner brushless DC motors. The servo control boards are of the shelf (for now). All motors are controlled by a central bus via a host controller,
which provides central position control (absolute encoders on the axes) and safety features.
The low-level control of each axis is implemented in the servo controllers.
The production of all components is done with self-developed machines (CNC 3-axis milling
machine, lathe and 3D printer). After manufacturing the circuit boards are assembled
and reflow soldered bymyself.
Electronics
The custom PCBs include:
- inkremental encoder
- power distribution board
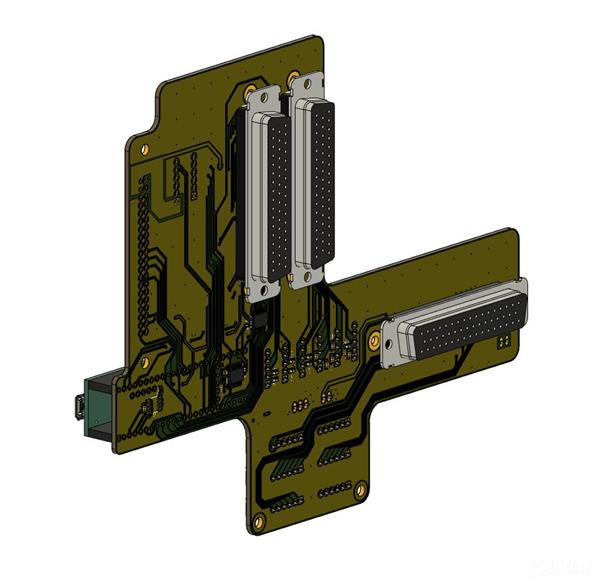
- main control board
The main control board is still a work and progress and is illustrated in the following:
Mechanics
The current status of the robot is shown in the cover photo. The overall design, including the 5th and 6th axis - can be seen in the following picture:

To improve the structual integrity and payload capablility all the structual components are made from aluminium excluding the the 6th axis, since this part is to complex to be machined on my machines.
First part of the video build series
Support from PCBway would be very helpful to realize the project, because it is solely done and financed by me and the skills of PCBway would allow me to improve and push the developments even further.
- Comments(1)
- Likes(0)












