





Project NORTH - Norther's Observant Robotic Talking Humanoid
Project NORTH
We are the Greeting Robot Capstone Team at Ohio Northern University. Our team members are Sylvia Fill (ME), Matthew Opara (CpE, CS), Logan Reichling (CS), Daniel Siatkosky (CS, DA), and Joseph D’Alessandri (ME).
We are building NORTH (Northern’s Observant Robotic Talking Humanoid) which is a person-sized humanoid robot designed to interact with people in social settings. This project aims to create a technologically exciting and visually impressive display piece that can be used at events to generate interest in ONU, the College of Engineering, and the project’s industry partners.
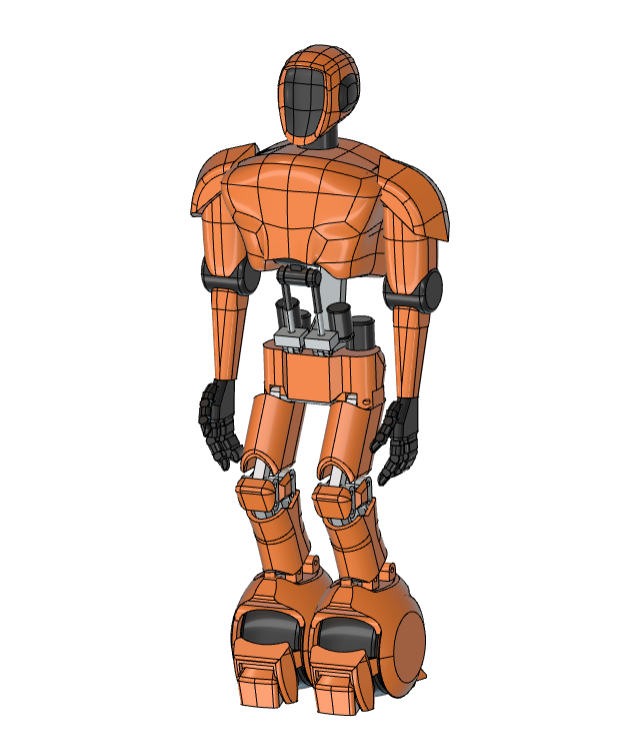
Despite continued advancements in robotics, humanoid robots are not widespread due to their significant cost and technological complexity. We have had to tackle and iterate on many of the primary issues that arise with this type of project, which are compounded by tight deadlines and a limited budget. We have found success tackling these challenges, and have created and implemented inventive solutions across the mechanical, electrical, and computational domains to produce an impressive overall project. Shown below is our concept model of the overall design of the robot, as this project is a continued work in progress.
Affordable Robotic Actuation
Typically, a robotic actuator has three main parts: A motor, a controller, and a mechanical torque amplifier. These systems as a complete package can cost upwards of $1000 per unit, which can be problematic when you need 20+ degrees of freedom.
For our motor various vendors. One of the T-Motor motors that we used is shown below.

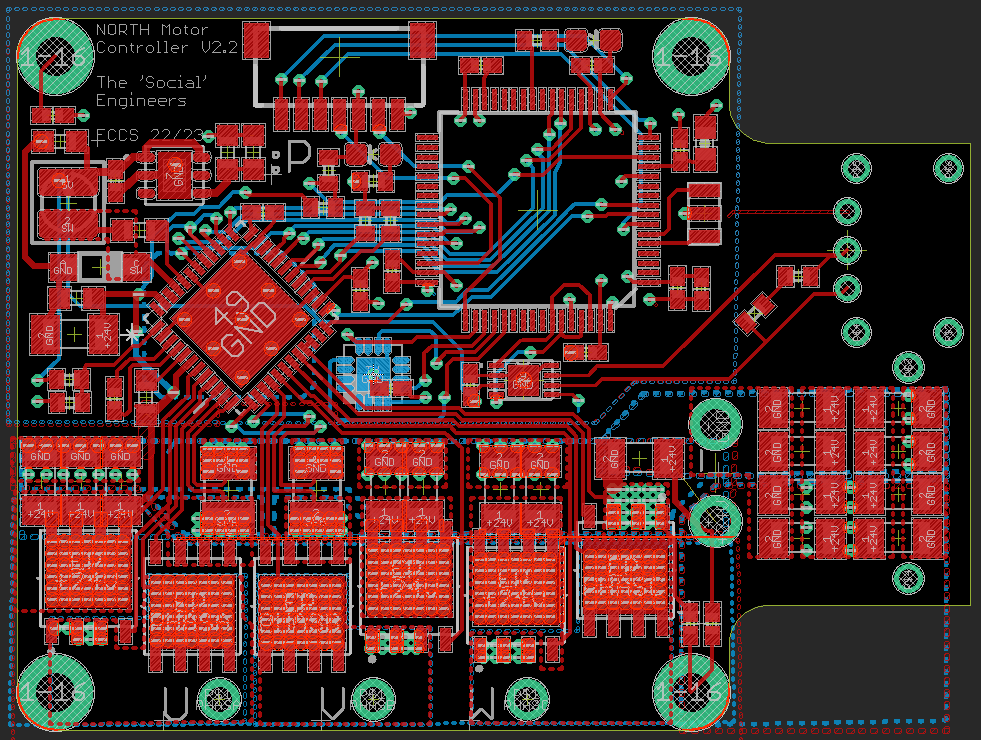
For the motor controllers, we modified an MIT-based design that is open source, created by Ben Katz. These controllers were sent to our sponsor, PCBway to be manufactured. We are grateful for their contribution as it allows us to utilize quick turnaround times to validate our design and integrate it into the project. Shown below is the current design for the motor controllers.
The rise of 3D printing technology has allowed for the creation of custom, lightweight actuators at a fraction of the cost of traditional manufacturing. This affordability opens the design up to many more people than would have been possible with other fabrication techniques. After trying and researching many different 3D printed designs such as planetary, cycloidal, strain-wave, and epicyclic, the final gearbox design settled on was a 35:1 RV Reducer. We started by validating the feasibility of the design by creating a proof of concept prototype as shown in this Reddit Post. We wanted to see how this design performed when it came to cost, ease of assembly, and mechanical efficiency / backdrivability. Upon finding that this design performed very well in all of the areas that we found as important, we created an extendable finalized version of the RV Reducer as detailed in this Reddit Post.
All gearboxes used within NORTH, as well as the aesthetic outer shell, are custom-designed and 3D printed using PLA Prime provided by our filament sponsor, COEX. Shown below is an exploded view of the RV Reducer that is similar to what was used in the final design, with the only difference being what is needed for specific arm joints of the robot.
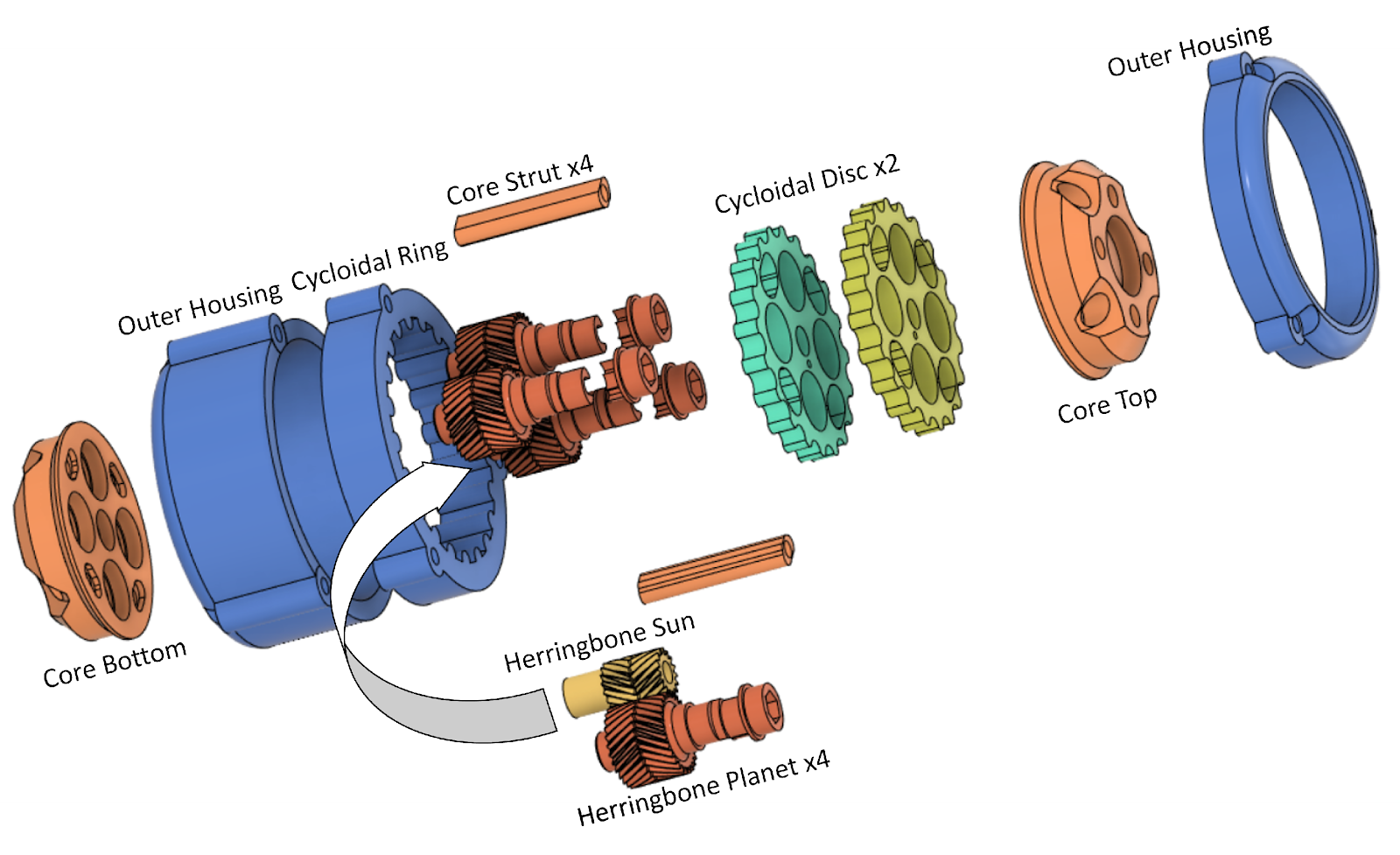
This gearbox design is something that anyone could make because it is 3D printed on hobby-grade 3D printers. All a person would need is a 3D printer to print the parts and the physical hardware such as the bearings, heat inserts, screws, and nuts, all of which are common, and relatively inexpensive. This gearbox has a 35:1 reduction which allows for substantial torque amplification. The gearbox is backdrivable, which allows for force feedback similar to what is found in cobots. This means that as part of the robot's control, a desired output force can be specified without the need for what is typically an expensive sensor that takes up a large amount of space.
Artificial Intelligence
Project NORTH utilizes artificial intelligence in many different ways. The primary user interactions are based around a pipeline composed of Speech to Text (STT), Natural Language Processing (NLP), and Text to Speech (TTS). NORTH’s STT and TTS are based around the NVIDIA NeMo framework, running on an NVIDIA Jetson graciously provided by NVIDIA, another of our generous sponsors, while its NLP is based on OpenAI’s GPT3. Many features of the robot, like positioning its limbs to compose a single, meaningful pose, are based on a combination of Google’s MediaPipe pose recognition and custom machine learning.
The innovative integration of various AI technologies in Project NORTH significantly enhances its capabilities and user experience. By leveraging the power of NVIDIA NeMo, OpenAI's GPT-3, and Google's MediaPipe, the project offers seamless communication and interaction with users. The combined use of STT, NLP, and TTS allows the robot to understand and respond to voice commands effectively, while the fusion of pose recognition and custom machine learning algorithms enables it to perform complex tasks and gestures with precision. As a result, Project NORTH stands out as a cutting-edge example of AI-driven robotics, paving the way for future advancements in the field and revolutionizing how humans interact with machines.

The NVIDIA Jetson platform was utilized to power our artificial intelligence programs, providing the necessary GPU acceleration and AI computing capabilities. This enabled the efficient development and deployment of advanced AI applications, significantly improving the performance and functionality of our overall robot.
Power Distribution and Master Control Board
Currently, a board to handle the power distribution needs of the robot is being developed. This board will have several features to ensure that the power is being managed safely and that all the motor control boards are being coordinated and able to communicate with each other. This includes a precharge circuit to prevent high current spikes from the capacitors on the motor control boards along with an emergency stop and other input devices for manual control of settings. The board's functionality is controlled by a teensy microcontroller that can communicate with the motor control boards. The system gets power from a single large Li-Po battery and handles any power that goes back into the battery produced through regenerative braking.

Conclusion
This project is currently a work in progress, but so far we have created some pretty amazing solutions to tackle the multifaceted problems that are inherent to complex humanoid robotics projects. We look forward to bringing all of these pieces together to achieve our ultimate goal of not only having the robot perform its intended purpose for our university but continually pushing the envelope of what can be accomplished by undergraduate students with a limited budget in robotics and further paving a path with newly available technologies for makers everywhere. We are grateful to all of our sponsors for supporting initiatives like this one and helping make this technological dream a reality!
- Comments(0)
- Likes(1)












