




Small Size Soccer Robots
We are a team of ten Major Qualifying Project (MQP) students at the Worcester Polytechnic Institute (WPI), working to enter the RoboCup Small Soccer League. RoboCup is an international robotics competition created with the goal of advancing robotics and artificial intelligence.
We are developing a team of 6 robots capable of competing in a soccer match autonomously. To do so, we have three sub-teams. The computer science group is creating and testing code in simulation to control the robots and implement an effective and successful strategy. The mechanical and electrical groups are working to design, build, and test six physical robots that will make up our RoboCup Team.
The RoboCup Small Size Soccer League games are played on a 6 meter by 9 meter field, with two teams of 6 robots, under a central vision system. The "soccer ball" the robots play with is an orange golf ball.
Here is the preliminary design of our robot:
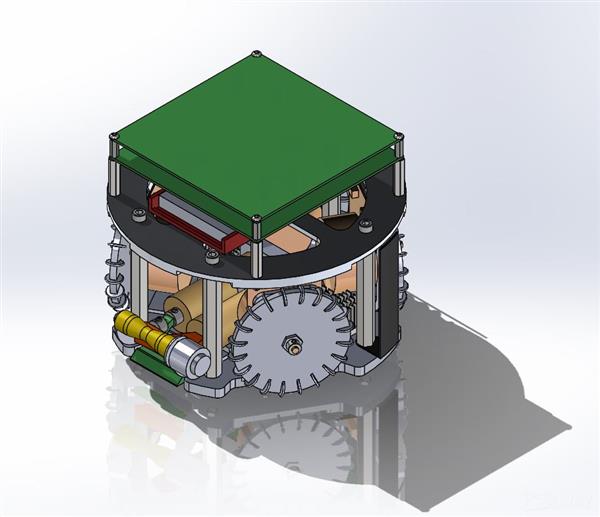
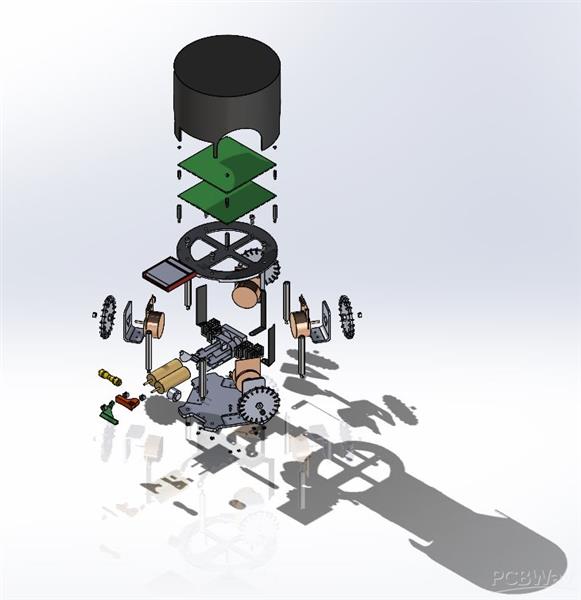
Here is what we currently have fabricated and mounted:


The 3D printed parts seen above are for proof-of-concept purposes only. We would like to machine these parts in aluminum.
These parts are the kicker, chipper, and the dribbler.
We lack the skillset and facilities to create these parts with our specifications. The current 3D printed parts do not meet our design specifications, as we need something durable that can both withstand the force of being struck into a golf ball and also not melt under operating conditions of our solenoids.
We would love to have PCBWay as a sponsor and would be happy to put your logo on all of our robots and team shirts!
- Comments(0)
- Likes(1)












