




UBC Unmanned Aircraft Systems (UAS) – PCB Projects
About the team:
UBC Unmanned Aircraft Systems is a Canadian Student design team focusing on innovating the unmanned aerospace industry. Students from diverse faculties such as Engineering, Arts, Science and Business all dedicate up to 30 hours a week to learning, designing, manufacturing and testing. Furthermore, we participate in a national competition, USC-STC Student UAS competition, and international competition, AUVSI SUAS.
This year our team aims to design a new aircraft called “The Vulture”, and build package delivery systems to be used for the delivery of medical and commercial packages for our two competitions. Our software team also aims to develop ground control software services, dynamic obstacle avoidance, and image processing systems. Furthermore, we place second in Phase 1 of the USC-STC Student UAS 2021 competition for our design paper.
Our Projects:
Vulture
Vulture is our flagship drone intended to fly completely autonomously at the AUVSI SUAS 2021 competition. The aircraft is capable of flying over waypoints, deploying the Wall-E rover, identifying objects on the ground and mapping a survey area. The multirotor can lift payloads up to 1.5kg and has a flight range of over 12 kilometres, with a top speed of 90km/h.

WallE
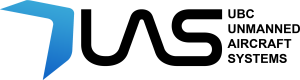
WallE is a two-wheeled autonomous rover intended to deliver a water bottle for the AUVSI SUAS Competition. The rover is dropped from our multirotor from a height of 100ft with a winch mechanism.
Scorpion
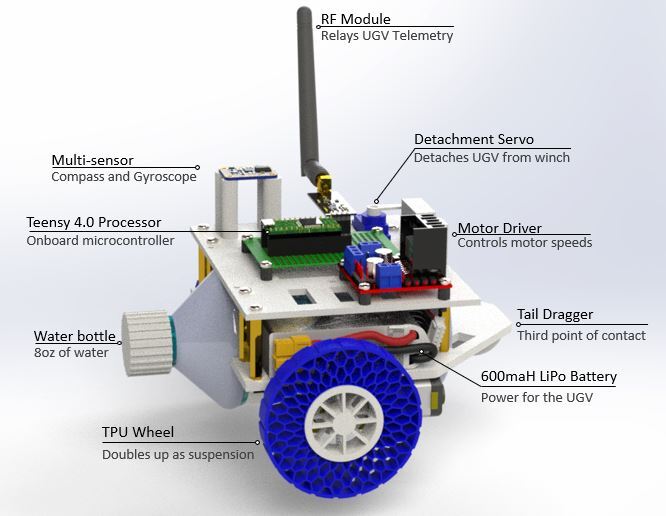
Scorpion is a tread based rover intended to carry medical packages for the USC-STC Student UAS competition. The rover uses an fpv camera to scan QR codes to determine the correct packages to pick up and their respective destination. The rover integrates with a net on our multirotor and is flown from a depot (pick up point) to a clinic (delivery location).
UAS PCB Design
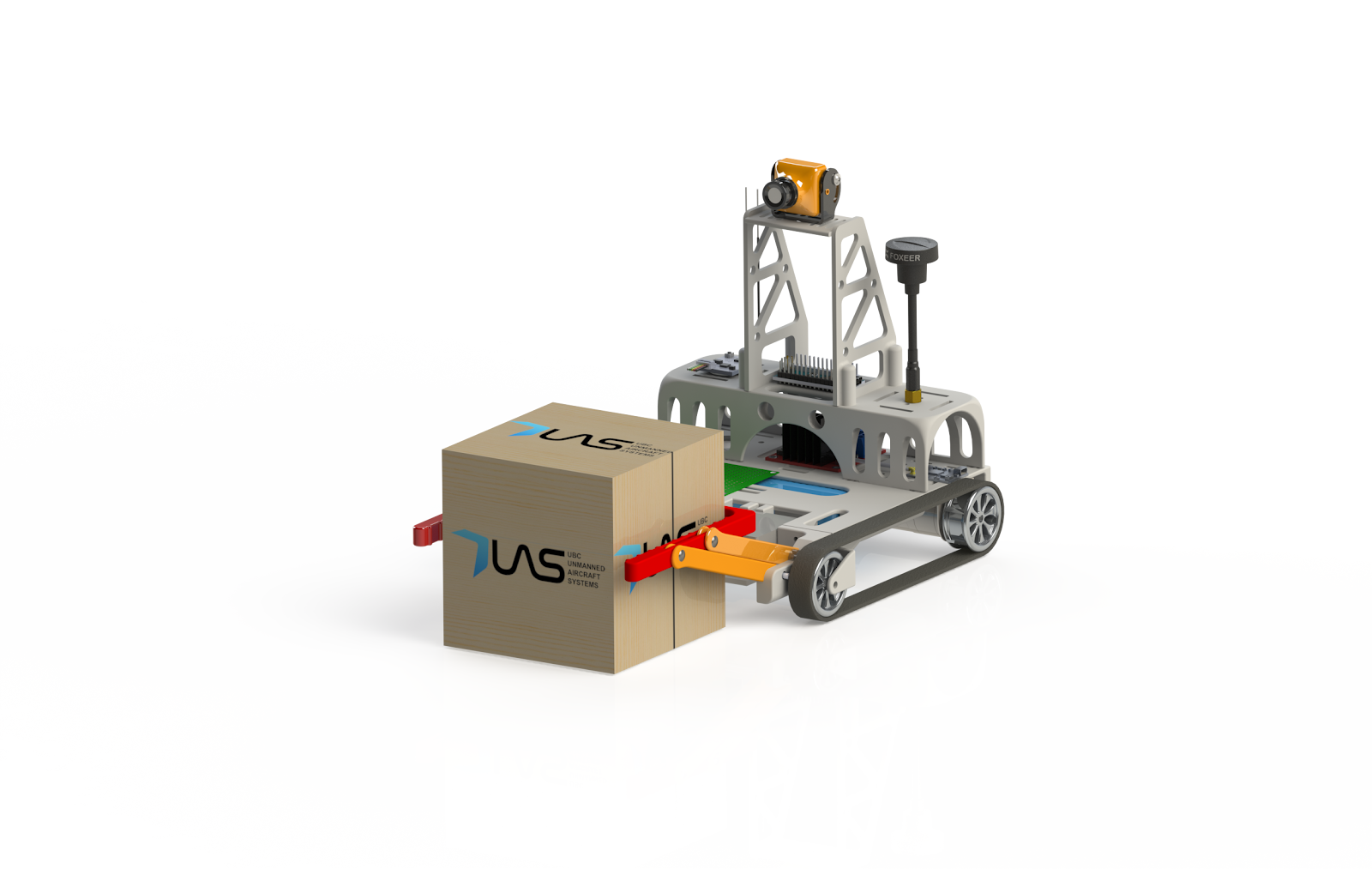
Vulture: Power Distribution Board (PDB)
Our Power Distribution Board is an integral part of functionality for our drones. This year, we would like to shift from using a premade PDB to designing our own. It needs to convert power from a 12S - 2P LiPo battery to 5V/5A and 12V/5A outputs, in order to power numerous onboard systems such as Pixhawk flight controllers, sensors, microcontrollers and radio telemetry systems. Furthermore, we need to measure the voltage and current being supplied from the batteries and power electronic speed circuits for the motors. With our demanding requirements, we need to be able to pull up to 250A at 50V from our batteries through the board!
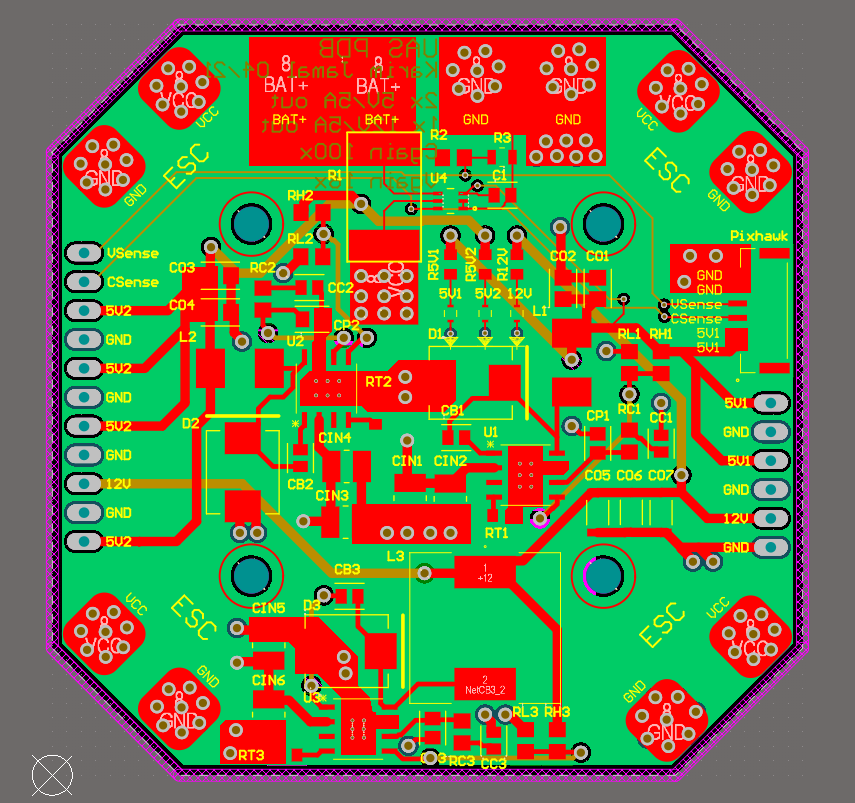
Shown above is our completed PDB design. It has 6 layers in total. There will be 2oz copper on the outer layers and 6oz copper on the inner layers. We have ensured that our board is able to carry up to 250A by correctly choosing trace width/spacing.
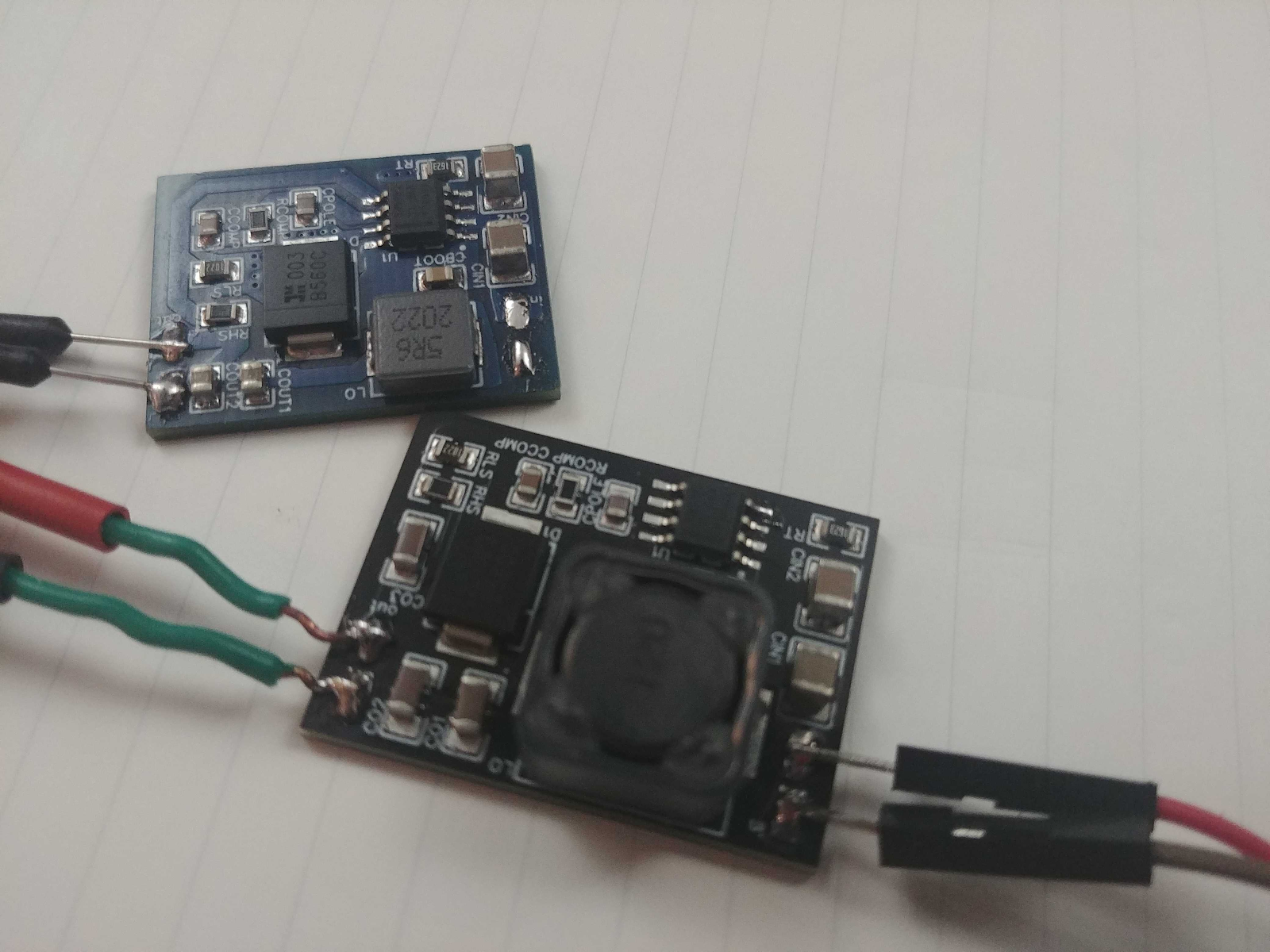
PCBWay has been very helpful in our design for this board. Earlier this year, we designed and ordered 2 prototype boards from PCBWay for testing. The online quote system is efficient and the website interface is intuitive. We were very happy with the end result and would like to order our final board from PCBWay as well.
WallE Rover PCB
The WALL-E PCB was designed to be a central hub for the navigation and control systems of an autonomous waypoint finding rover. The PCB is designed to be a streamlined method for managing the rover's electrical requirements by replacing bulky external wires with carefully placed internal traces. Another benefit of the PCB is its modularity and ease of repair. In the case of a component becoming damaged, it can easily be replaced with a new one through basic desoldering and soldering techniques. Another benefit of the PCB is that it eliminates the risk of components becoming disconnected by securing them with solder flux. As the rover will be lowered by a winch from a drone and drives through rugged terrain, any unsecured electrical components are likely to disconnect which is an issue the PCB prevents. Overall, from controlling the motors to relaying GPS data, this PCB is an efficient and modular way of managing the electrical requirements of an autonomous rover.
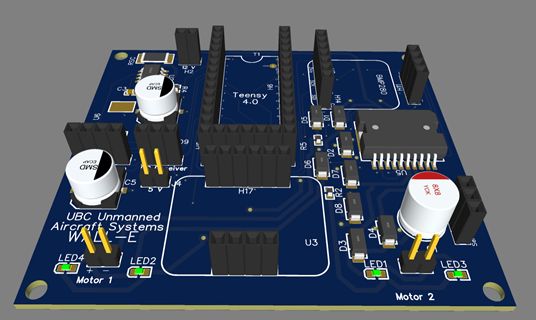
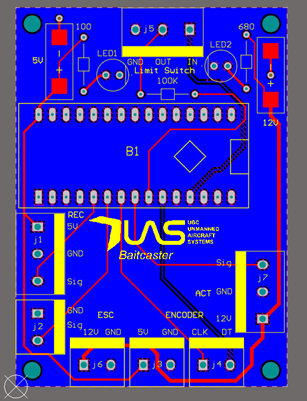
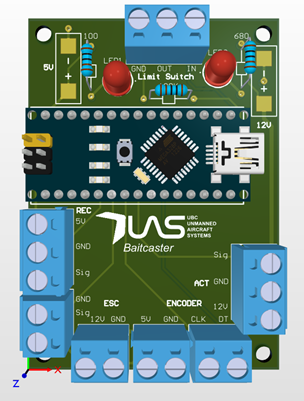
WallE Winch PCB
The main purpose of the Winch PCB is to control the descent of our AUVSI rover using a PID control loop. The PCB board takes in 12 and 5 V to power all the components. Indicator LEDs are incorporated to assist with debugging any power issues. An Arduino Nano is used to carry out the PID control with the required speed information collected by the encoder. To maintain a constant rover decent speed a linear actuator pulls a string wrapped around the winch shaft as instructed by the PID control. Friction in the system changes based on how tight the string is pulled which is how the shaft speed is controlled. The rover line is reeled back to the drone using an ESC controlled DC motor. A limit switch is used to stop the motor once the carabiner at the end of the line has reached the drone. Screw-in terminals are used to secure components onto the board because they offer the convenience of easily swapping out components during our competition.
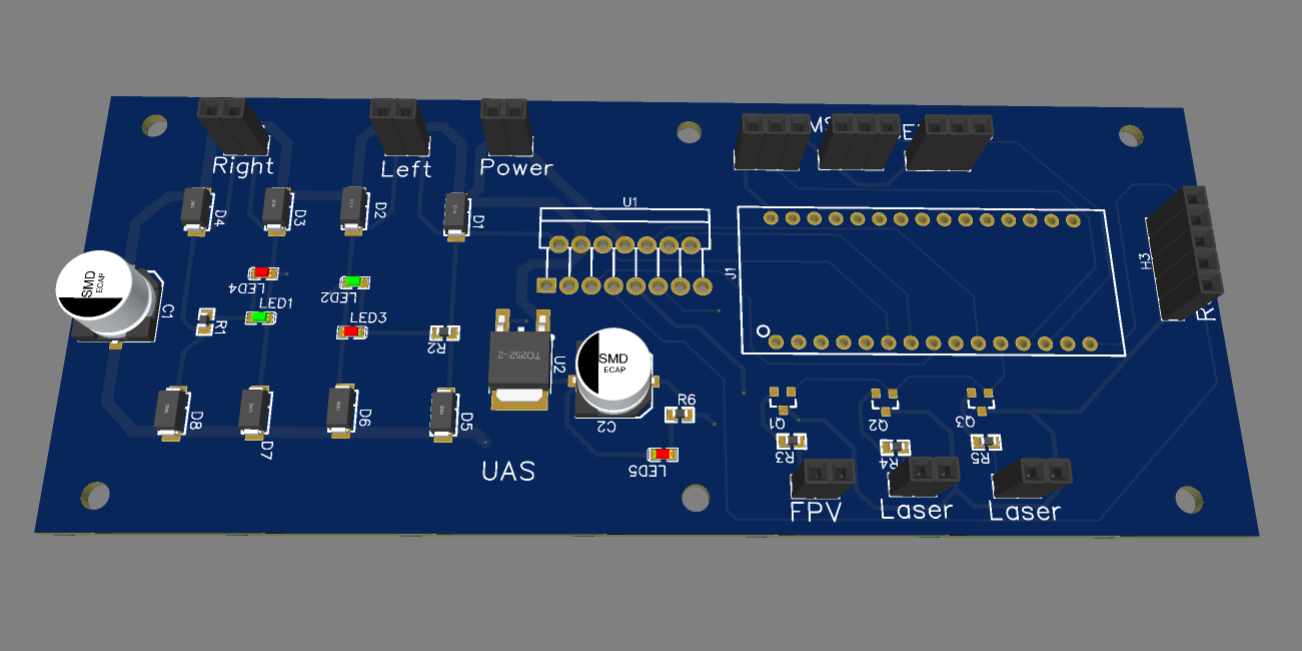
Scorpion Rover PCB
The PCB for Scorpion features a compact integration of all the components needed for Scorpion to function. Using the PCB Scorpion’s wiring becomes significantly more organized and we are able to cut the weight of the rover down considerably. It includes headers for the rover’s servo’s and a built in motor driver. The board also includes a voltage regulator to step down the 12V battery voltage to 5V for the onboard arduino nano and other 5V components.
In return for any sponsorship you offer us, we can offer you brand exposure across our social media pages. We have over 1000 followers - all interested in engineering. Thank you for your time in considering our request. Any assistance PCBWay could provide us would be greatly appreciated.
For more information about UBC UAS, please visit ubcuas.com or check our social media @UBC UAS
- Comments(0)
- Likes(0)












