AmadorUAVs - Boreas
About the Team
Amador Valley Unmanned Aerial Vehicles (AmadorUAVs) is a high school robotics club based in Pleasanton, CA. Since 2018, we have been designing an autonomous octocopter drone to compete in the international AUVSI SUAS competition, a collegiate contest where each aircraft must perform a series of tasks including waypoint navigation, obstacle avoidance, computer vision, and payload drop.
As one of only 4 high schools among 70 college teams, we recently won second place, beating many prestigious universities including Cornell, Duke, IIT Bombay, and others.

(Our team at the competition grounds)
The Drone
Our main drone, named Boreas, is a large coaxial quadcopter design (2 motors * 4 arms) with a 1.4 meter arm span and a 2 meter propeller tip-to-tip span. It uses a Pixhawk 5X flight controller with PX4 autopilot. It also includes a Jetson Nano to run our image processing and autonomous detection. All of this is sandwiched in between two large carbon fiber plates, holding down the large carbon fiber arms. A smaller top plate holds our 6S 22Ah LiPo batteries, and a wooden plate on the bottom carries additional electronics, our ground vehicle, and our camera/gimbal.
To see more about our drone, check out our website at https://www.amadoruavs.com/

(Boreas is able to produce over 45kg of thrust and can hover for 45 minutes)
Custom Boards
Our team heavily utilizes custom PCB designs in order to pack powerful MEMS sensors and microcontrollers into small spaces, and in order to simplify our electronics onboard our vehicles. However, these board designs push against the limit of what we, as a small high school robotics team, are capable of assembling ourselves. Without access to expensive tools, it is very difficult to reliably assemble small pitch QFN components, BGA sensors, and 0402 passives.
Rover Driver Board
One of our tasks is to drop an autonomous ground rover from the drone. It needs to be as small and light as possible to fit on the bottom of the drone. Our new driver board controls the motors, payload winch, and power regulation of the rover. This will significantly reduce the overall weight and size of the rover. It also replaces delicate wires with more robust PCB traces, which will improve reliability.

(A KiCAD render of the PCB)
AHRS Board
Many of our vehicles and devices, including the drone but also our camera gimbal and ground vehicle, require accurate angle and altitude estimation. For this purpose a compact, yet powerful solution is needed; our team has designed a custom, low-cost AHRS (Altitude and Heading Reference System) solution, which keeps our costs down while utilizing the latest MEMS technology. This type of technology is essential for our small form factor devices, such as our custom camera gimbal. Due to the small mobile sensor chips used on this compact board, it is especially difficult to manufacture ourselves.

(A KiCAD render of the PCB)
Power Monitoring Module
Due to the high voltage and current consumption of our drone, it is very difficult to find off the shelf power modules that monitor current consumption (to calculate remaining flight time) and regulate lower voltage for our electronics. We designed a power module that includes a microcontroller and CAN for power monitoring.

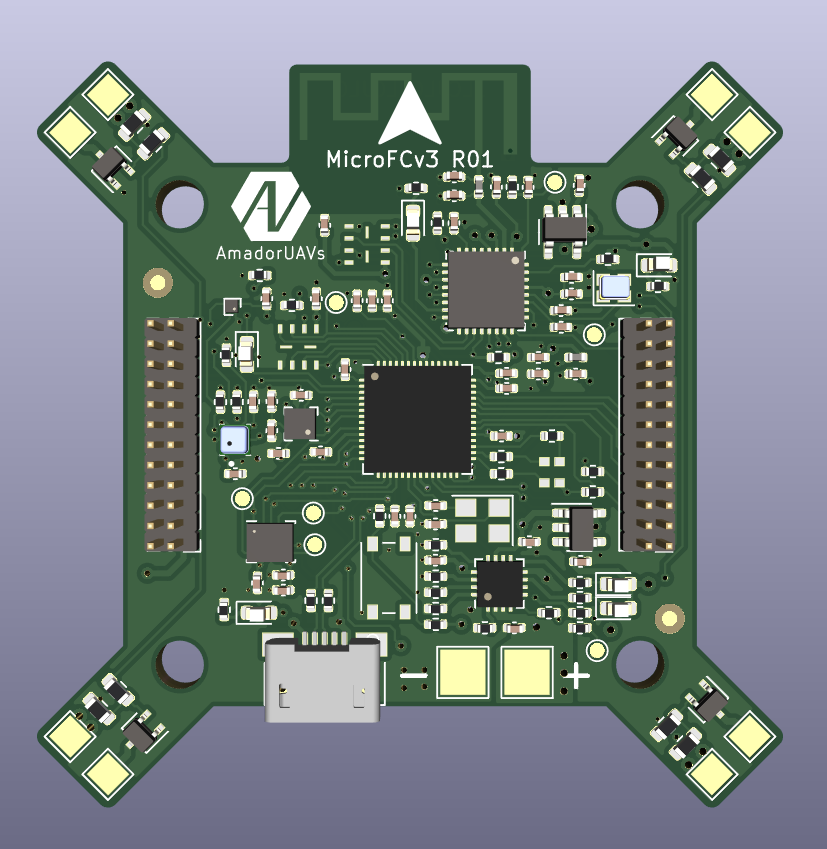
Microdrone
One of our club’s most ambitious projects is to design an open source, small form factor, inexpensive drone for education and experimentation. By utilizing a custom, integrated flight controller to keep weight down and integrate state-of-the-art sensors into a tiny package, we hope to be able to bring low-cost access to high-quality open-source drone technology to our entire community. However, due to the complexity of the board (over 150 components per FC!) and the size of some of the sensors, hand assembly is unfeasible.


Antenna Tracker Controller
To communicate with our drone in flight, we use a Ubiquiti PowerBeam WiFi dish. Since it is a directional antenna, we designed a motorized antenna tracker to point it at the drone. We have created a Raspberry Pi HAT PCB with sensors and motor drivers to control the tracker.

The problem we face in most of these designs is that they are just far too small to manufacture by hand. They have a number of small components that make it almost impossible for us to assemble by ourselves. Due to this, a lot of the boards shown are unable to work as they should, and we are left with insufficient products. Receiving support from PCBWay would allow us to further develop these boards as well as more, furthering our project and increasing our performance overall.




Thank you for your support!

AmadorUAVs - Boreas
















- Comments(0)
- Likes(2)
 More by Engineer
More by Engineer
-
-
-
-
kmMiniSchield MIDI I/O - IN/OUT/THROUGH MIDI extension for kmMidiMini
137 0 0 -
DIY Laser Power Meter with Arduino
212 0 2 -
-
Box & Bolt, 3D Printed Cardboard Crafting Tools
186 0 2