







|
|
DC geared motor |
x 4 | |
|
|
Mecanum left and right wheel pair |
x 1 | |
|
|
2-pin female JST connector |
x 4 | |
|
|
2-pin male JST connector |
x 4 | |
|
|
BATTERY-18650 |
x 2 | |
|
|
18650 battery holder |
x 1 | |

|
D01-9923246Harwin Inc.
|
x 1 | |

|
OS102011MA1QS1C&K
|
x 1 | |
|
|
Female header pin |
x 1 | |
|
|
D1 mini ESP32 |
x 1 | |
|
|
4-pin female JST connector |
x 2 | |
|
|
3-pin female JST connector |
x 2 | |
|
|
PS3 controller |
x 1 | |
|
|
Mini USB |
x 1 | |
|
|
Micro USB |
x 1 | |
|
|
PCB |
x 1 | |
|
|
PCB stencil |
x 1 | |
|
|
2.7mm x 29mm screws and their nuts |
x 8 | |
|
|
1.8mm x 10mm screws and their nuts |
x 4 | |
|
|
3D-printed spacer |
x 4 | |
|
|
3D-printed body |
x 1 | |
|
|
L9110S IC |
x 4 | |
|
|
0.1 µF capacitor |
x 2 | |
|
|
10k resistor |
x 2 | |
|
|
22 µF capacitor |
x 2 | |
|
|
10 µH inductor |
x 2 | |
|
|
26.1k variable resistor |
x 2 | |

|
MP2307DN-LF-ZMonolithic Power Systems Inc.
|
x 2 | |
|
|
10k resistor |
x 2 | |
|
|
3.9 nF capacitor |
x 2 | |
|
|
6.8k resistor |
x 2 | |
|
|
0.1 µF capacitor |
x 2 | |
|
|
100k resistor |
x 2 | |
|
|
10 µF capacitor |
x 4 | |
|
|
LED indicator light |
x 1 | |
|
|
1k resistor |
x 1 |

|
arduino IDEArduino
|
|
|
|
Sixaxis Pair Tool |
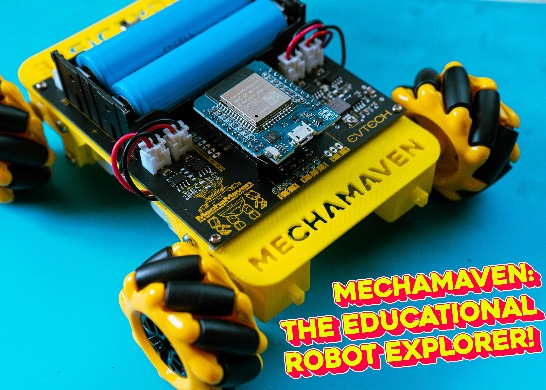
MechaMaven: The Educational Robot Explorer!
Hi everyone! I'm Earl Daniel Villanueva, the founder of Evtech, and for today's project, we're going to build MechaMaven: The Educational Robot Explorer.
But hey, you might be wondering, Earl, how can you claim that this is an educational robot?
Well, I specifically designed this for educational purposes. It has 10 output pins to connect 10 sensors or an LCD. It also has 2 output pins for the I2C interface. It includes 4 motor drivers to operate 4 motors, with the option to add up to 6 servo motors. Also, it is equipped with a passive buzzer to play music, and much more! This robot can be controlled using a PS3 controller, a mobile phone, and a computer. But for today's video, we are going to focus on controlling this robot using a PS3 controller.
VIDEO TUTORIAL:
Okay, So what are we waiting for? Let's get ride into it!
Things used in this project
Let's start with the things you will need: 4 pcs of DC geared motor, Mecanum left and right wheel pair, 4 pcs of 2-pin female JST connector, 4 pcs of 2-pin male JST connector, 2 pcs of 18650 battery, 1 pc of 18650 battery holder, a male header pin, 1 pc of slide switch, a female header pin, an ESP32 D1 Mini, 2 pcs of 4-pin female JST connector, 2 pcs of 3-pin female JST connector, a PS3 controller, a mini USB, a micro USB, the PCB, a PCB stencil, 8 pcs of 2.7mm x 29mm screws and their nuts, 4 pcs of 1.8mm x 10mm screws and their nuts, a 3D-printed spacer, and the 3D-printed body.
Components:
1. DC geared motor - 4 pcs
2. Mecanum left and right wheel pair - 1 pair
3. 2-pin female JST connector - 4 pcs
4. 2-pin male JST connector - 4 pcs
5. 18650 battery - 2 pcs
6. 18650 battery holder - 1 pc
7. Male header pin - 1 pc
8. Slide switch - 1 pc
9. Female header pin - 1 pc
10. ESP32 D1 Mini - 1 pc
11. 4-pin female JST connector - 2 pcs
12. 3-pin female JST connector - 2 pcs
13. PS3 controller - 1 pc
14. Mini USB - 1 pc
15. Micro USB - 1 pc
16. PCB - 1 pc
17. PCB stencil - 1 pc
18. 2.7mm x 29mm screws and their nuts - 8 pcs
19. 1.8mm x 10mm screws and their nuts - 4 pcs
20. 3D-printed spacer - 4 pc
21. 3D-printed body - 1 pc
Surface-Mount Device (SMD) Components:
1. L9110S IC - 4 pcs
2. 0.1 µF capacitor - 1 pc
3. 10k resistor - 1 pc
4. 22 µF capacitor - 1 pc
5. 10 µH inductor - 1 pc
6. 26.1k variable resistor - 1 pc
7. MP2307 IC - 2 pc
8. 10k resistor - 1 pc
9. 3.9 nF capacitor - 1 pc
10. 6.8k resistor - 1 pc
11. 0.1 µF capacitor - 1 pc
12. 100k resistor - 1 pc
13. 10 µF capacitor - 2 pc
14. LED indicator light - 1 pc
15. 1k resistor - 1 pc
For the hand tools and fabrication machines, you will need a soldering iron, a soldering pump, soldering wire, soldering lead, a hot air SMD rework station, solder paste, tweezers, and a 3D printer to print the body of the robot.
Hand Tools and Fabrication Machines:
1. Soldering iron
2. Soldering pump
3. Soldering wire
4. Soldering lead
5. Hot air SMD rework station
6. Solder paste
7. Tweezers
8. 3D printer (to print the body of the robot)
3D Print Some Parts
The first thing we need to do is print the body of this robot, followed by printing these 4 pieces of spacer.
Soldering Time!
First, we need to place the stencil on top of the PCB. Then, apply a decent amount of solder paste and spread it over the holes in the stencil. After doing that, remove the stencil from the PCB.
Next, place all the SMD components, starting with the L9110S IC, followed by the 0.1 uF capacitor, and the 10k resistor. From this point, I'll just list the names and values of the components based on their placement on the PCB: a 22uF capacitor, a 10 uH inductor, a 26.1K variable resistor, an MP2307 IC, a 10K resistor, a 3.9 nF capacitor, a 6.8K resistor, a 0.1 uF capacitor, a 100K resistor, and two 10 uF capacitors. Repeat this process on the other side of the PCB. Also, don't forget the LED indicator light and the 1K resistor. Look at that! It really looks awesome! Now, using a hot air rework station, melt the solder paste, which will effectively position the components correctly.
After that, it's time to solder all the THT components, starting with the 2-pin JST female connector, followed by the slide switch. Next, solder the 3-pin and 4-pin JST female connectors, the 18650 battery holder, the passive buzzer, and the female header pin for the ESP32.
And there you have it, we're done placing all the components on the PCB.
Yes, of course, I have provided the Gerber files and the schematic diagram for this project.
Now, it's time to solder the male header pins of the ESP32.
The 3D Printed Body
Now it's time to attach the PCB to the 3D-printed body. Start by inserting the 4 pieces of 1.8mm x 10mm screws into the PCB, making sure to place the spacers between the PCB and the 3D-printed body. After that, secure them with the nuts.
The Motor
Of course, this robot car will not work without the motors. We need to attach all 4 motors to the 3D-printed body first. Secure them in place using the 2.7mm x 29mm screws and their nuts.
Solder the Wires of the Motor
In this part of the tutorial, we need to do some soldering again. We need to solder wires from the PCB to the motors, and we will use the 4 pieces of 2-pin male JST connectors.
For the orientation of this robot, remember that this is the front part. If you look closely at the PCB, there are indicators showing where to connect the wires from the motors to the PCB. For instance, "MFR" stands for Motor Front Right, meaning this is where you will connect the wire from the front right motor of the robot to the PCB. So make sure to take note of that.
The Mecanum Wheel
Now, we need to attach the Mecanum wheels to the shafts of the motors. Before doing this, make sure you are placing the wheels in the correct orientation. The Mecanum wheel has a specific mechanism and will not work properly if it is not placed correctly.
If you look closely at the Mecanum wheel, there are labels indicating whether it is for the right or left side of the robot. So in this case, since these are the wheels for the right side, I'll attach these two wheels to the right side, and the other two to the left side of the robot.
Downloading the Arduino IDE
It's programming time! But before we can program the ESP32, we need to download the Arduino IDE. First, go to the Arduino website and download the Arduino IDE.
After clicking the download button, wait for the download to complete. Once done, we need to install the Arduino IDE. Click on the downloaded file, and follow the installation steps: click "I agree," then "Next," and finally "Install." Once the installation is complete, click the "Finish" button to run the Arduino IDE.
Link: https://www.arduino.cc/en/software
Downloading the Code
We need to open the browser again and go to my GitHub repository to download the code. You can do this by typing github.com/earldanielph.
After that, all my repositories will appear, and you need to click on "MechaMaven." Once there, click on "Code," and download it as a zip file.
Click on the downloaded file, right-click, and extract the file. Then, open the "MechaMavenByEvtech" code.
Link: https://github.com/earldanielph/MechaMaven
Downloading the necessary library
This time, we need to download the PS3 Controller library. Copy this part of the code and paste it into your browser. Click on this link and then this one. Click on the code and download it as a zip file. After that, go to Sketch, include library, add .ZIP library, and select the downloaded library file.
Link: https://github.com/jvpernis/esp32-ps3/tree/master
Downloading the ESP32 board manager
Go back to your browser and type 'ESP32 download manager'. Click on this link, scroll down a bit, copy the URL. Return to your Arduino IDE, click on 'File', then 'Preferences'. Click on this, and paste the URL you copied from the website earlier. Click 'OK', and then click here. Now, go to 'Board Manager', type 'ESP32', and install the ESP32 board manager under Espressif Systems.
Link: https://randomnerdtutorials.com/installing-the-esp32-board-in-arduino-ide-windows-instructions/
Downloading Sixaxis Pair Tool
Now, return to your browser to download the Sixaxis Pair Tool. Type 'Sixaxis' into your browser, click on this link, and hit the download button. Just wait for it to start downloading. Once it's done, open the file, click 'Next', then 'Next' again, click here, and hit 'Install'. Once installation is complete, click 'Finish'.
Link: https://sixaxispairtool.en.lo4d.com/windows
Getting the MAC address of the PS3 controller
This time, we need to open the Sixaxis Pair Tool and insert the USB cable from the computer into the PS3 controller. Once you've done that, the MAC address of your controller will appear on the Sixaxis Pair Tool.
In my case, this is my MAC address, and I will type it into my code. After getting your MAC address, you can now remove the USB cable from your computer going to your PS3 controller.
Uploading the code to ESP32
And finally, we are now going to upload the code to the ESP32. Make sure to connect the micro USB cable from your computer to your ESP32. Now, click on 'Tools', then 'Board', select 'Wemos D1 Mini ESP32'. Click on 'Tools' again, then 'Port', and choose the appropriate port for your ESP32. In my case, it is COM24. Finally, click 'Upload'.
Once the uploading is done, you can now remove the micro USB cable from your ESP32 and connect your ESP32 to your PCB.
Demo
There you have it—the project is completed! It's time to sit back and enjoy the fruits of your labor.
Enjoy!
And that's it for today's video. This has been Earl Daniel Villanueva, and as always, keep learning and having fun! Bye!
MechaMaven: The Educational Robot Explorer!
*PCBWay community is a sharing platform. We are not responsible for any design issues and parameter issues (board thickness, surface finish, etc.) you choose.













Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW
ESP32-S3 4.3inch Capacitive Touch Display Development Board, 800×480, 5-point Touch, 32-bit LX7 Dual-core Processor
BUY NOW
Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW


- Comments(0)
- Likes(3)
 Log in to post comments.
Log in to post comments.
- 2 USER VOTES
- YOUR VOTE 0.00 0.00

-
10design
-
10usability
-
10creativity
-
10content

-
10design
-
10usability
-
10creativity
-
10content
More by Earl Daniel earldanielph
-
 MechaMaven: The Educational Robot Explorer!
Hi everyone! I'm Earl Daniel Villanueva, the founder of Evtech, and for today's project, we're going...
MechaMaven: The Educational Robot Explorer!
Hi everyone! I'm Earl Daniel Villanueva, the founder of Evtech, and for today's project, we're going...
-
 Homebrew PCB Exposure Box Using An Old Printer Scanner!
Did you know that we can create a homebrew PCB exposure box using an old printer scanner? Yes you re...
Homebrew PCB Exposure Box Using An Old Printer Scanner!
Did you know that we can create a homebrew PCB exposure box using an old printer scanner? Yes you re...
-
-
Commodore 64 1541-II 1581 Floppy Disk Drive C64 Power Supply Unit USB-C 5V 12V DIN connector 5.25
392 1 3 -
-
-
-
-
-
-
Modifying a Hotplate to a Reflow Solder Station
1253 1 6 -
MPL3115A2 Barometric Pressure, Altitude, and Temperature Sensor
714 0 1 -

















