










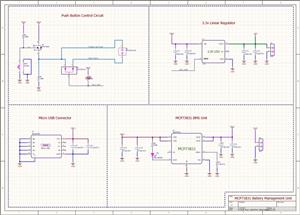












MCP73831 Based BMS Unit
A battery management system (BMS) is any electronic system that manages a rechargeable battery (cell or battery pack), such as by protecting the battery from operating outside its safe operating area[clarification needed], monitoring its state, calculating secondary data, reporting that data, controlling its environment, authenticating it and / or balancing it.
A battery pack built together with a battery management system with an external communication data bus is a smart battery pack. A smart battery pack must be charged by a smart battery charger
Monitor
A BMS may monitor the state of the battery as represented by various items, such as:
Voltage: total voltage, voltages of individual cells, or voltage of periodic taps
Temperature: average temperature, coolant intake temperature, coolant output temperature, or temperatures of individual cells
Coolant flow: for air or liquid cooled batteries
Current: current in or out of the battery
Electric vehicle systems: energy recovery
The BMS will also control the recharging of the battery by redirecting the recovered energy (i.e.- from regenerative braking) back into the battery pack (typically composed of a number of battery modules, each composed of a number of cells).
Battery thermal management systems can be either passive or active, and the cooling medium can either be air, liquid, or some form of phase change. Air cooling is advantageous in its simplicity. Such systems can be passive, relying only on the convection of the surrounding air, or active, utilizing fans for airflow. Commercially, the Honda Insight and Toyota Prius both utilize active air cooling of their battery systems.[2] The major disadvantage of air cooling is its inefficiency. Large amounts of power must be used to operate the cooling mechanism, far more than active liquid cooling.

The additional components of the cooling mechanism also add weight to the BMS, reducing the efficiency of batteries used for transportation.
Liquid cooling has a higher natural cooling potential than air cooling as liquid coolants tend to have higher thermal conductivities than air. The batteries can either be directly submerged in the coolant or coolant can flow through the BMS without directly contacting the battery. Indirect cooling has the potential to create large thermal gradients across the BMS due to the increased length of the cooling channels. This can be reduced by pumping the coolant faster through the system, creating a tradeoff between pumping speed and thermal consistency.
Computation
Additionally, a BMS may calculate values based on the below items, such as
Voltage: minimum and maximum cell voltage
State of charge (SOC) or depth of discharge
(DOD), to indicate the charge level of the battery
State of health (SOH), a variously-defined measurement of the remaining capacity of the battery as % of the original capacity
State of power (SOP), the amount of power available for a defined time interval given the current power usage, temperature and other conditions
State of Safety (SOS)
Maximum charge current as a charge current limit (CCL)
Maximum discharge current as a discharge current limit (DCL)
Energy [kWh] delivered since last charge or charge cycle
Internal impedance of a cell (to determine open circuit voltage)
Charge [Ah] delivered or stored (sometimes this feature is called Coulomb counter)
Total energy delivered since first use
Total operating time since first use
Total number of cycles
Temperature Monitoring
Communication
The central controller of a BMS communicates internally with its hardware operating at a cell level, or externally with high level hardware such as laptops or an HMI.
High level external communication are simple and use several methods
Different types of serial communications.
CAN bus communications, commonly used in automotive environments.
Different types of Wireless communications.
Low voltage centralized BMSs mostly do not have any internal communications.
Distributed or modular BMSs must use some low level internal cell-controller (Modular architecture) or controller-controller (Distributed architecture) communication. These types of communications are difficult, especially for high voltage systems. The problem is voltage shift between cells. The first cell ground signal may be hundreds of volts higher than the other cell ground signal. Apart from software protocols, there are two known ways of hardware communication for voltage shifting systems, Optical-isolator and wireless communication. Another restriction for internal communications is the maximum number of cells. For modular architecture most hardware is limited to maximum 255 nodes. For high voltage systems the seeking time of all cells is another restriction, limiting minimum bus speeds and losing some hardware options. Cost of modular systems is important, because it may be comparable to the cell price.Combination of hardware and software restrictions results to be a few options for internal communication:
Isolated serial communications
wireless serial communications
To bypass power limitations of existing USB cables due to heat from electrical current, communication protocols implemented in mobile phone chargers for negotiating an elevated voltage have been developed, the most widely used of which are Qualcomm Quick Charge and MediaTek Pump Express. "VOOC" by Oppo (also branded as "Dash Charge" with "OnePlus") increases the current instead of voltage with the aim to reduce heat produced in the device from internally converting an elevated voltage down to the battery's terminal charging voltage, which however makes it incompatible with existing USB cables and relies on special high-current USB cables with accordingly thicker copper wires. More recently, the USB Power Delivery standard aims for an universal negotiation protocol across devices of up to 240 Watts.
Protection
A BMS may protect its battery by preventing it from operating outside its safe operating area, such as:[citation needed]
Over-current (may be different in charging and discharging modes)
Over-voltage (during charging), especially important for lead–acid and Li-ion cells
Under-voltage (during discharging)
Over-temperature
Under-temperature
Over-pressure (NiMH batteries)
Ground fault or leakage current detection (system monitoring that the high voltage battery is electrically disconnected from any conductive object touchable to use like vehicle body)
The BMS may prevent operation outside the battery's safe operating area by:
Including an internal switch (such as a relay or solid state device) which is opened if the battery is operated outside its safe operating area
Requesting the devices to which the battery is connected to reduce or even terminate using the battery.
Actively controlling the environment, such as through heaters, fans, air conditioning or liquid cooling
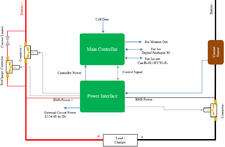
BMS Main Controller
Battery connection to load circuit
A BMS may also feature a precharge system allowing a safe way to connect the battery to different loads and eliminating the excessive inrush currents to load capacitors.
The connection to loads is normally controlled through electromagnetic relays called contactors. The precharge circuit can be either power resistors connected in series with the loads until the capacitors are charged. Alternatively, a switched mode power supply connected in parallel to loads can be used to charge the voltage of the load circuit up to a level close enough to battery voltage in order to allow closing the contactors between battery and load circuit. A BMS may have a circuit that can check whether a relay is already closed before precharging (due to welding for example) to prevent inrush currents to occur.
Balancing
![]()
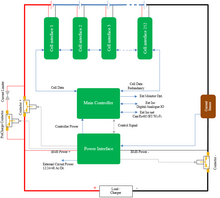
Distributed Battery Management system
In order to maximize the battery's capacity, and to prevent localized under-charging or over-charging, the BMS may actively ensure that all the cells that compose the battery are kept at the same voltage or State of Charge, through balancing. The BMS can balance the cells by:
Wasting energy from the most charged cells by connecting them to a load (such as through passive regulators)
Shuffling energy from the most charged cells to the least charged cells (balancers)
Reducing the charging current to a sufficiently low level that will not damage fully charged cells, while less charged cells may continue to charge (does not apply to Lithium chemistry cells)
Topologies[edit]
Cable Data transfer module

BMS Wireless Communication
BMS technology varies in complexity and performance:
Simple passive regulators achieve balancing across batteries or cells by bypassing charging current when the cell's voltage reaches a certain level. The cell voltage is a poor indicator of the cell's SOC (and for certain Lithium chemistries such as LiFePO4 it is no indicator at all), thus, making cell voltages equal using passive regulators does not balance SOC, which is the goal of a BMS. Therefore, such devices, while certainly beneficial, have severe limitations in their effectiveness.
Active regulators intelligently turning on and off a load when appropriate, again to achieve balancing. If only the cell voltage is used as a parameter to enable the active regulators, the same constraints noted above for passive regulators apply.
A complete BMS also reports the state of the battery to a display, and protects the battery.
Smart Battery System (SBS) is a specification for managing a smart battery, usually for a portable computer. It allows operating systems to perform power management operations via a smart battery charger based on remaining estimated run times by determining accurate state of charge readings. Through this communication, the system also controls the battery charge rate. Communication is carried over an SMBus two-wire communication bus. The specification originated with the Duracell and Intel companies in 1994, but was later adopted by several battery and semiconductor makers.
The Smart Battery System defines the SMBus connection, the data that can be sent over the connection (Smart Battery Data or SBD), the Smart Battery Charger, and a computer BIOS interface for control. In principle, any battery operated product can use SBS.
A special integrated circuit in the battery pack (called a fuel gauge or battery management system) monitors the battery and reports information to the SMBus. This information might include battery type, model number, manufacturer, characteristics, charge/discharge rate, predicted remaining capacity, an almost-discharged alarm so that the PC or other device can shut down gracefully, and temperature and voltage to provide safe fast-charging.
BMS topologies fall in 3 categories:
Centralized: a single controller is connected to the battery cells through a multitude of wires
Distributed: a BMS board is installed at each cell, with just a single communication cable between the battery and a controller
Modular: a few controllers, each handling a certain number of cells, with communication between the controllers
Centralized BMSs are most economical, least expandable, and are plagued by a multitude of wires. Distributed BMSs are the most expensive, simplest to install, and offer the cleanest assembly. Modular BMSs offer a compromise of the features and problems of the other two topologies.

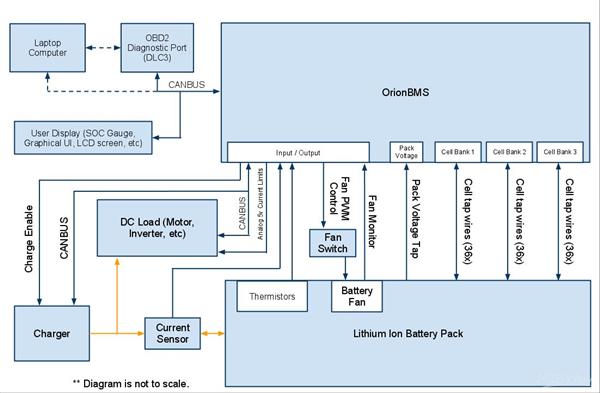
The requirements for a BMS in mobile applications (such as electric vehicles) and stationary applications (like stand-by UPSs in a server room) are quite different, especially from the space and weight constraint requirements, so the hardware and software implementations must be tailored to the specific use. In the case of electric or hybrid vehicles, the BMS is only a subsystem and cannot work as a standalone device. It must communicate with at least a charger (or charging infrastructure), a load, thermal management and emergency shutdown subsystems. Therefore, in a good vehicle design the BMS is tightly integrated with those subsystems. Some small mobile applications (such as medical equipment carts, motorized wheelchairs, scooters, and fork lifts) often have external charging hardware, however the on-board BMS must still have tight design integration with the external charger.


MCP73831 Based BMS Unit
*PCBWay community is a sharing platform. We are not responsible for any design issues and parameter issues (board thickness, surface finish, etc.) you choose.


















- Comments(0)
- Likes(0)
More by Sreeram.zeno
-
 Esp12-F Cluster V1.0
The ESP8266 is a low-cost Wi-Fi microchip, with built-in TCP/IP networking software, and microcontro...
Esp12-F Cluster V1.0
The ESP8266 is a low-cost Wi-Fi microchip, with built-in TCP/IP networking software, and microcontro...
-
 TB6612FNG Motor Driver
The TB6612FNG Motor Driver can control up to two DC motors at a constant current of 1.2A (3.2A peak)...
TB6612FNG Motor Driver
The TB6612FNG Motor Driver can control up to two DC motors at a constant current of 1.2A (3.2A peak)...
-
 Sunny Buddy Solar Charger v1.0
This is the Sunny Buddy, a maximum power point tracking (MPPT) solar charger for single-cell LiPo ba...
Sunny Buddy Solar Charger v1.0
This is the Sunny Buddy, a maximum power point tracking (MPPT) solar charger for single-cell LiPo ba...
-
 Diy 74HC4051 8 Channel Mux Breakout Pcb
The 74HC4051; 74HCT4051 is a single-pole octal-throw analog switch (SP8T) suitable for use in analog...
Diy 74HC4051 8 Channel Mux Breakout Pcb
The 74HC4051; 74HCT4051 is a single-pole octal-throw analog switch (SP8T) suitable for use in analog...
-
 Diy RFM97CW Breakout Pcb
IntroductionLoRa? (standing for Long Range) is a LPWAN technology, characterized by a long range ass...
Diy RFM97CW Breakout Pcb
IntroductionLoRa? (standing for Long Range) is a LPWAN technology, characterized by a long range ass...
-
 ProMicro-RP2040 Pcb
The RP2040 is a 32-bit dual ARM Cortex-M0+ microcontroller integrated circuit by Raspberry Pi Founda...
ProMicro-RP2040 Pcb
The RP2040 is a 32-bit dual ARM Cortex-M0+ microcontroller integrated circuit by Raspberry Pi Founda...
-
 Serial Basic CH340G Pcb
A USB adapter is a type of protocol converter that is used for converting USB data signals to and fr...
Serial Basic CH340G Pcb
A USB adapter is a type of protocol converter that is used for converting USB data signals to and fr...
-
 Mp3 Shield For Arduino
Hardware OverviewThe centerpiece of the MP3 Player Shield is a VS1053B Audio Codec IC. The VS1053B i...
Mp3 Shield For Arduino
Hardware OverviewThe centerpiece of the MP3 Player Shield is a VS1053B Audio Codec IC. The VS1053B i...
-
 MRK CAN Shield Arduino
The CAN-BUS Shield provides your Arduino or Redboard with CAN-BUS capabilities and allows you to hac...
MRK CAN Shield Arduino
The CAN-BUS Shield provides your Arduino or Redboard with CAN-BUS capabilities and allows you to hac...
-
 AVR ISP Programmer
AVR is a family of microcontrollers developed since 1996 by Atmel, acquired by Microchip Technology ...
AVR ISP Programmer
AVR is a family of microcontrollers developed since 1996 by Atmel, acquired by Microchip Technology ...
-
 Diy Arduino mega Pcb
The Arduino Mega 2560 is a microcontroller board based on the ATmega2560. It has 54 digital input/ou...
Diy Arduino mega Pcb
The Arduino Mega 2560 is a microcontroller board based on the ATmega2560. It has 54 digital input/ou...
-
 Max3232 Breakout Board
MAX3232 IC is extensively used for serial communication in between Microcontroller and a computer fo...
Max3232 Breakout Board
MAX3232 IC is extensively used for serial communication in between Microcontroller and a computer fo...
-
 Line Follower Pcb
The Line Follower Array is a long board consisting of eight IR sensors that have been configured to ...
Line Follower Pcb
The Line Follower Array is a long board consisting of eight IR sensors that have been configured to ...
-
 HMC6343 Accelerometer Module
The HMC6343 is a solid-state compass module with tilt compensation from Honeywell. The HMC6343 has t...
HMC6343 Accelerometer Module
The HMC6343 is a solid-state compass module with tilt compensation from Honeywell. The HMC6343 has t...
-
 RTK2 GPS Module For Arduino
USBThe USB C connector makes it easy to connect the ZED-F9P to u-center for configuration and quick ...
RTK2 GPS Module For Arduino
USBThe USB C connector makes it easy to connect the ZED-F9P to u-center for configuration and quick ...
-
 Arduino Explora Pcb
The Arduino Esplora is a microcontroller board derived from the Arduino Leonardo. The Esplora differ...
Arduino Explora Pcb
The Arduino Esplora is a microcontroller board derived from the Arduino Leonardo. The Esplora differ...
-
 Diy Stepper Motor Easy Driver
A motor controller is a device or group of devices that can coordinate in a predetermined manner the...
Diy Stepper Motor Easy Driver
A motor controller is a device or group of devices that can coordinate in a predetermined manner the...
-
 Diy Arduino Pro Mini
The Arduino Pro Mini is a microcontroller board based on the ATmega168 . It has 14 digital input/out...
Diy Arduino Pro Mini
The Arduino Pro Mini is a microcontroller board based on the ATmega168 . It has 14 digital input/out...
-
-
-
-
Tester for Touch Screen Digitizer without using microcontroller
335 2 2 -
Audio reactive glow LED wristband/bracelet with NFC / RFID-Tags
317 0 1 -
-
-




















