











|
MCP23017T-E/SOMicrochip Technology
|
x 1 | |

|
CC0805KRX7R9BB104YAGEO
|
x 1 | |

|
CC0805ZRY5V6BB105Yageo
|
x 1 | |

|
CL21A475KAQNNNESamsung Electro-Mechanics
|
x 1 | |
|
|
AECR0805F1K00K9 Resistor 0805 1kResistorToday
|
x 2 |
|
|
EasyEDA |
A breadboard friendly MCP23017 breakout
2C port extenders or expanders are extremely useful devices, and I use quite a lot of them in my projects. My go-to device is definitely the PCF8574, mainly because it is sort of “breadboard friendly”. The MCP23017, with the existing breakouts available locally, are not. I have thus decided to design my own version of a breadboard friendly MCP23017 breakout board.
The Breakout Module PCB and its features
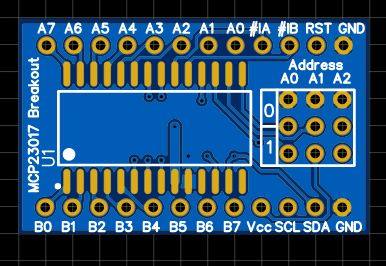
A breadboard friendly MCP23017 breakout board – Front
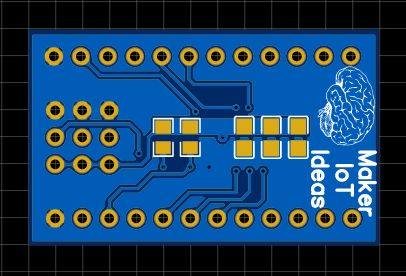
a breadboard friendly MCP23017 breakout board – Back
While this was definitely one of my easier projects, It still took a bit of time to get it just right and add some essential components and features directly onto the PCB.
The main features of this breakout:
– DIP12 Layout – with all pins broken out, address pins to jumper headers…
– Proper decoupling capacitors, as close as possible to the MCP23017 chip.
I had to make use of the back layer of the PCB to do this, not exactly ideal, but with proper power and ground planes, and nice thick tracks, I believe they will be just fine.
– Address selector jumpers – The breakouts that are available locally, do not have these.
– Breadboard friendly layout – 33.020mm x 20.320mm [board size], with 15.240mm vertical spacing between the rows of pins, ensures that you can easily fit it onto your breadboard, while still having space to add jumper wires to the pins. Horizontal pin spacing is standard 2.54mm.
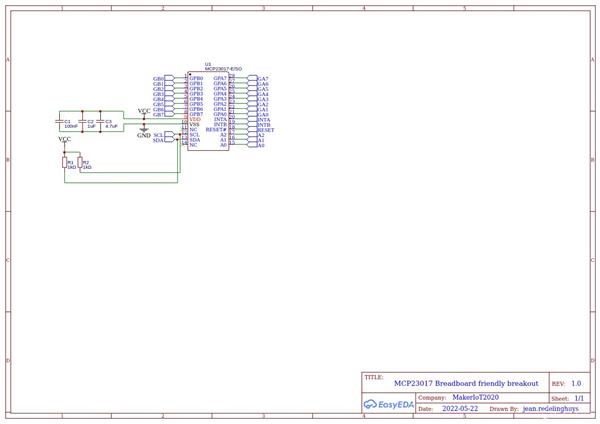
The Schematic
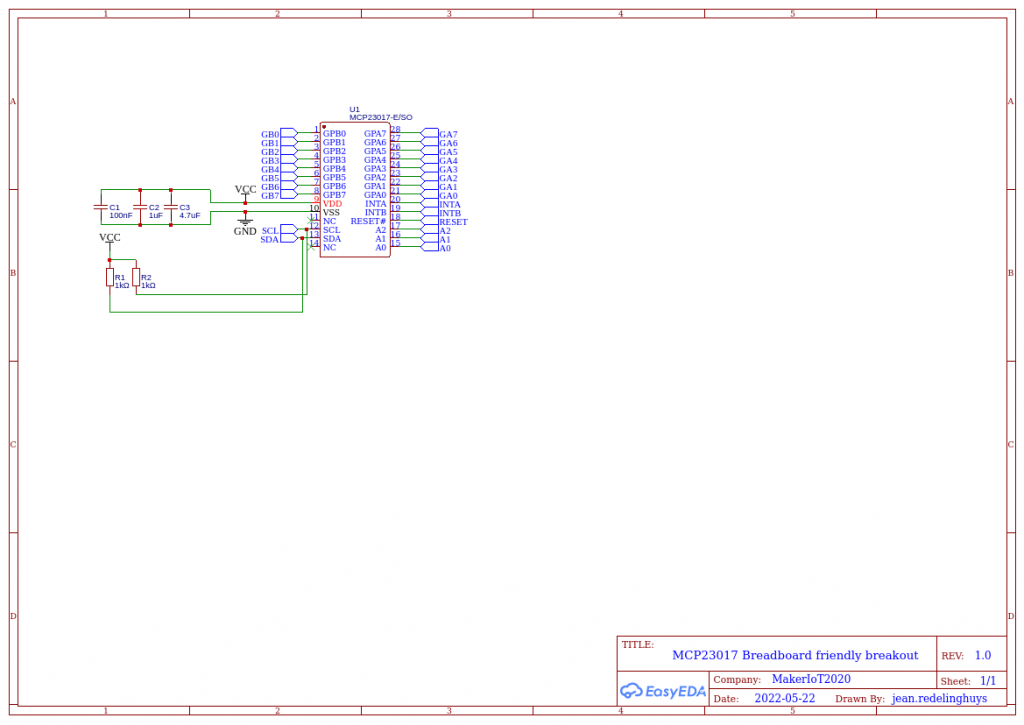
The schematic is plain and simple. A few points to note though:
– The address selection header, as well as the io pin headers are not shown on the schematic.
– I2C pullup resistors are set at 1k but can be replaced with more suitable values as required in your circuit
Using the breakout
Let us look at some of the features of this chip
16-Bit Remote Bidirectional I/O Port:
I/O pins default to input
? High-Speed I2C Interface (MCP23017):
100 kHz
400 kHz
1.7 MHz
? High-Speed SPI Interface (MCP23S17):
10 MHz (maximum)
? Three Hardware Address Pins to Allow Up to
Eight Devices On the Bus
? Configurable Interrupt Output Pins:
Configurable as active-high, active-low or
open-drain
? INTA and INTB Can Be Configured to Operate
Independently or Together
? Configurable Interrupt Source:
Interrupt-on-change from configured register
defaults or pin changes
? Polarity Inversion Register to Configure the
Polarity of the Input Port Data
? External Reset Input
? Low Standby Current: 1 μA (max.)
? Operating Voltage:
1.8V to 5.5V @ -40°C to +85°C
2.7V to 5.5V @ -40°C to +85°C
4.5V to 5.5V @ -40°C to +125°C
The sixteen I/O ports are separated into two ‘ports’ – A (on the right) and B (on the left. Pin 9 connects to 5V, 10 to GND, 11 isn’t used, 12 is the I2C bus clock line (Arduino Uno/Duemilanove analogue pin 5, Mega pin 21), and 13 is the I2C bus data line (Arduino Uno/Duemailnove analogue pin 4, Mega pin 20).
External pull-up resistors should be used on the I2C bus – in our examples we use 1k ohm values. Pin 14 is unused, and we won’t be looking at interrupts, so ignore pins 19 and 20. Pin 18 is the reset pin, which is normally high – therefore you ground it to reset the IC. So connect it to 5V!
Finally we have the three hardware address pins 15~17. These are used to determine the I2C bus address for the chip. If you connect them all to GND, the address is 0x20. If you have other devices with that address or need to use multiple MCP23017s, see figure 1-2 in the datasheet.
You can alter the address by connecting a combination of pins 15~17 to 5V (1) or GND (0). For example, if you connect 15~17 all to 5V, the control byte becomes 0100111 in binary, or 0x27 in hexadecimal.
Using the Standard Wire.h library
Addressing
The 23017 has three input pins to allow you to set a different address for each attached MCP23017.
The above corresponds to a hardware address for the three lines A0, A1, A2 corresponding to the input pin values at the IC. You must set the value of these hardware inputs as 0V or (high) volts and not leave them floating otherwise they will get random values from electrical noise and the chip will do nothing!
The four left most bits are fixed a 0100 (specified by a consortium who doles out address ranges to manufacturers).
So the MCP23017 I2C address range is 32 decimal to 37 decimal or 0x20 to 0x27 for the MCP23017.
Please note: The addresses are the same as those for the PCF8475. You must thus be careful if you use these two devices on the same i2c bus!
MCP23017 Non interrupt registers
IODIR I/O direction register
For controlling I/O direction of each pin, register IODIR (A/B) lets you set the pin to an output when a zero is written and to an input when a ‘1’ is written to the register bit. This is the same scheme for most microcontrollers – the key is to remember that zero (‘0’) equates to the ‘O’ in Output.
GPPU Pullup register
Setting a bit high sets the pullup active for the corresponding I/O pin.
OLAT Output Latch register
This is exactly the same as the I/O port in 18F series PIC chips where you can read back the “desired” output of a port pin whether or not the actual state of that pin is reached. i.e. consider a strong current LED attached to the pin – it is easily possible to pull down the output voltage at the pin to below the logic threshold i.e. you would read back a zero if reading from the pin itself when in fact it should be a one. Reading the OLAT register bit returns a ‘one’ as you would expect from a software engineering point of view.
IPOL pin inversion register
The IPOL(A/B) register allows you to selectively invert any input pin. This reduces the glue logic needed to interface other devices to the MCP23017 since you won’t need to add inverter logic chips to get the correct signal polarity into the MCP23017.
It is also very handy for getting the signals the right way up e.g. it is common to use a pull up resistor for an input so when a user presses an input key the voltage input is zero, so in software you have to remember to test for zero.
Using the MCP23017 you could invert that input and test for a 1 (in my mind a key press is more equivalent to an on state i.e. a ‘1’) however I use pullups all the time (and uCs in general use internal pullups when enabled) so have to put up with a zero as ‘pressed’. Using this device would allow you to correct this easily.Note: The reason that active low signals are used everywhere is a historical one: TTL (Transistor Transistor Logic) devices draw more power in the active low state due to the internal circuitry, and it was important to reduce unnecessary power consumption – therefore signals that are inactive most of the time e.g. a chip select signal – were defined to be high. With CMOS devices either state causes the same power usage so it now does not matter – however active low is used because everyone uses it now and used it in the past.
SEQOP polling mode : register bit : (Within IOCON register)
If you have a design that has critical interrupt code e.g. for performing a timing critical measurement you may not want non critical inputs to generate an interrupt i.e. you reserve the interrupt for the most important input data.
In this case, it may make more sense to allow polling of some of the device inputs. To facilitate this “Byte mode” is provided. In this mode, you can read the same set of GPIOs using clocks but not needling to provide other control information. i.e. it stays on the same set of GPIO bits, and you can continuously read it without the register-address updating itself. In non-byte mode, you either have to set the address you read from (A or B bank) as control input data.
Now to examine how to use the IC in our sketches.
As you should know by now most I2C devices have several registers that can be addressed. Each address holds one byte of data that determines various options. So before using we need to set whether each port is an input or an output. First, we’ll examine setting them as outputs.
So to set port A to outputs, we use:
Wire.beginTransmission(0x20);
Wire.write(0x00); // IODIRA register
Wire.write(0x00); // set all of port A to outputs
Wire.endTransmission();
Then to set port B to outputs, we use:
Wire.beginTransmission(0x20);
Wire.write(0x01); // IODIRB register
Wire.write(0x00); // set all of port B to outputs
Wire.endTransmission();
So now we are in void loop() or a function of your own creation and want to control some output pins. To control port A, we use:
Wire.beginTransmission(0x20);
Wire.write(0x12); // address port A
Wire.write(??); // value to send
Wire.endTransmission();
To control port B, we use:
Wire.beginTransmission(0x20);
Wire.write(0x13); // address port B
Wire.write(??); // value to send
Wire.endTransmission();
… replacing ?? with the binary or equivalent hexadecimal or decimal value to send to the register.
To calculate the required number, consider each I/O pin from 7 to 0 matches one bit of a binary number – 1 for on, 0 for off. So you can insert a binary number representing the status of each output pin. Or if binary does your head in, convert it to hexadecimal. Or a decimal number.
So for example, you want pins 7 and 1 on. In binary that would be 10000010, in hexadecimal that is 0x82, or 130 decimal. (Using decimals is convenient if you want to display values from an incrementing value or function result).
For example, we want port A to be 11001100 and port B to be 10001000 – so we send the following (note we converted the binary values to decimal):
Wire.beginTransmission(0x20);
Wire.write(0x12); // address port A
Wire.write(204); // value to send
Wire.endTransmission();
Wire.beginTransmission(0x20);
Wire.write(0x13); // address port B
Wire.write(136); // value to send
Wire.endTransmission();
A complete Example
// pins 15~17 to GND, I2C bus address is 0x20
#include "Wire.h"
void setup()
{
Wire.begin(); // wake up I2C bus
// set I/O pins to outputs
Wire.beginTransmission(0x20);
Wire.write(0x00); // IODIRA register
Wire.write(0x00); // set all of port A to outputs
Wire.endTransmission();
Wire.beginTransmission(0x20);
Wire.write(0x01); // IODIRB register
Wire.write(0x00); // set all of port B to outputs
Wire.endTransmission();
}
void binaryCount()
{
for (byte a=0; a<256; a++)
{
Wire.beginTransmission(0x20);
Wire.write(0x12); // GPIOA
Wire.write(a); // port A
Wire.endTransmission();
Wire.beginTransmission(0x20);
Wire.write(0x13); // GPIOB
Wire.write(a); // port B
Wire.endTransmission();
}
}
void loop()
{
binaryCount();
delay(500);
}
Using the pins as inputs
Although that may have seemed like a simple demonstration, it was created show how the outputs can be used. So now you know how to control the I/O pins set as outputs. Note that you can’t source more than 25 mA of current from each pin, so if switching higher current loads use a transistor and an external power supply and so on.
Now let’s turn the tables and work on using the I/O pins as digital inputs. The MCP23017 I/O pins default to input mode, so we just need to initiate the I2C bus. Then in the void loop() or other function all we do is set the address of the register to read and receive one byte of data.
// pins 15~17 to GND, I2C bus address is 0x20
#include "Wire.h"
byte inputs=0;
void setup()
{
Serial.begin(9600);
Wire.begin(); // wake up I2C bus
}
void loop()
{
Wire.beginTransmission(0x20);
Wire.write(0x13); // set MCP23017 memory pointer to GPIOB address
Wire.endTransmission();
Wire.requestFrom(0x20, 1); // request one byte of data from MCP20317
inputs=Wire.read(); // store the incoming byte into "inputs"
if (inputs>0) // if a button was pressed
{
Serial.println(inputs, BIN); // display the contents of the GPIOB register in binary
delay(200); // for debounce
}
}
Using the Adafruit Library
You can download the Adafruit MCP23017 Library from here..
Some examples, directly from the library, all code belongs to Adafruit, and was not written by me.
1. A Button Example
#include <Wire.h>
#include "Adafruit_MCP23017.h"
// Basic pin reading and pullup test for the MCP23017 I/O expander
// public domain!
// Connect pin #12 of the expander to Analog 5 (i2c clock)
// Connect pin #13 of the expander to Analog 4 (i2c data)
// Connect pins #15, 16 and 17 of the expander to ground (address selection)
// Connect pin #9 of the expander to 5V (power)
// Connect pin #10 of the expander to ground (common ground)
// Connect pin #18 through a ~10kohm resistor to 5V (reset pin, active low)
// Input #0 is on pin 21 so connect a button or switch from there to ground
Adafruit_MCP23017 mcp;
void setup() {
mcp.begin(); // use default address 0
mcp.pinMode(0, INPUT);
mcp.pullUp(0, HIGH); // turn on a 100K pullup internally
pinMode(13, OUTPUT); // use the p13 LED as debugging
}
void loop() {
// The LED will 'echo' the button
digitalWrite(13, mcp.digitalRead(0));
}
2. An Interrupt Example
// Install the LowPower library for optional sleeping support.
// See loop() function comments for details on usage.
//#include <LowPower.h>
#include <Wire.h>
#include <Adafruit_MCP23017.h>
Adafruit_MCP23017 mcp;
byte ledPin=13;
// Interrupts from the MCP will be handled by this PIN
byte arduinoIntPin=3;
// ... and this interrupt vector
byte arduinoInterrupt=1;
volatile boolean awakenByInterrupt = false;
// Two pins at the MCP (Ports A/B where some buttons have been setup.)
// Buttons connect the pin to grond, and pins are pulled up.
byte mcpPinA=7;
byte mcpPinB=15;
void setup(){
Serial.begin(9600);
Serial.println("MCP23007 Interrupt Test");
pinMode(arduinoIntPin,INPUT);
mcp.begin(); // use default address 0
// We mirror INTA and INTB, so that only one line is required between MCP and Arduino for int reporting
// The INTA/B will not be Floating
// INTs will be signaled with a LOW
mcp.setupInterrupts(true,false,LOW);
// configuration for a button on port A
// interrupt will triger when the pin is taken to ground by a pushbutton
mcp.pinMode(mcpPinA, INPUT);
mcp.pullUp(mcpPinA, HIGH); // turn on a 100K pullup internally
mcp.setupInterruptPin(mcpPinA,FALLING);
// similar, but on port B.
mcp.pinMode(mcpPinB, INPUT);
mcp.pullUp(mcpPinB, HIGH); // turn on a 100K pullup internall
mcp.setupInterruptPin(mcpPinB,FALLING);
// We will setup a pin for flashing from the int routine
pinMode(ledPin, OUTPUT); // use the p13 LED as debugging
}
// The int handler will just signal that the int has happen
// we will do the work from the main loop.
void intCallBack(){
awakenByInterrupt=true;
}
void handleInterrupt(){
// Get more information from the MCP from the INT
uint8_t pin=mcp.getLastInterruptPin();
uint8_t val=mcp.getLastInterruptPinValue();
// We will flash the led 1 or 2 times depending on the PIN that triggered the Interrupt
// 3 and 4 flases are supposed to be impossible conditions... just for debugging.
uint8_t flashes=4;
if(pin==mcpPinA) flashes=1;
if(pin==mcpPinB) flashes=2;
if(val!=LOW) flashes=3;
// simulate some output associated to this
for(int i=0;i<flashes;i++){
delay(100);
digitalWrite(ledPin,HIGH);
delay(100);
digitalWrite(ledPin,LOW);
}
// we have to wait for the interrupt condition to finish
// otherwise we might go to sleep with an ongoing condition and never wake up again.
// as, an action is required to clear the INT flag, and allow it to trigger again.
// see datasheet for datails.
while( ! (mcp.digitalRead(mcpPinB) && mcp.digitalRead(mcpPinA) ));
// and clean queued INT signal
cleanInterrupts();
}
// handy for interrupts triggered by buttons
// normally signal a few due to bouncing issues
void cleanInterrupts(){
EIFR=0x01;
awakenByInterrupt=false;
}
/**
* main routine: sleep the arduino, and wake up on Interrups.
* the LowPower library, or similar is required for sleeping, but sleep is simulated here.
* It is actually posible to get the MCP to draw only 1uA while in standby as the datasheet claims,
* however there is no stadndby mode. Its all down to seting up each pin in a way that current does not flow.
* and you can wait for interrupts while waiting.
*/
void loop(){
// enable interrupts before going to sleep/wait
// And we setup a callback for the arduino INT handler.
attachInterrupt(arduinoInterrupt,intCallBack,FALLING);
// Simulate a deep sleep
while(!awakenByInterrupt);
// Or sleep the arduino, this lib is great, if you have it.
//LowPower.powerDown(SLEEP_1S, ADC_OFF, BOD_OFF);
// disable interrupts while handling them.
detachInterrupt(arduinoInterrupt);
if(awakenByInterrupt) handleInterrupt();
}
A breadboard friendly MCP23017 breakout
*PCBWay community is a sharing platform. We are not responsible for any design issues and parameter issues (board thickness, surface finish, etc.) you choose.













Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW
ESP32-S3 4.3inch Capacitive Touch Display Development Board, 800×480, 5-point Touch, 32-bit LX7 Dual-core Processor
BUY NOW
Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW


- Comments(0)
- Likes(0)
 Log in to post comments.
Log in to post comments.
More by Jean Redelinghuys MakerIoT2020
-
 RA-02 Breakout with Level converters
Breadboard and beginner-friendly RA-02 Breakout ModuleMost Makers and electronics enthusiasts may al...
RA-02 Breakout with Level converters
Breadboard and beginner-friendly RA-02 Breakout ModuleMost Makers and electronics enthusiasts may al...
-
 ATMEGA328P Module with integrated LoRa and CAN Bus
ATMEGA328P Module with integrated LoRa and CAN-BUSINTRODUCTIONIn my quest to perfect my LoRa telemet...
ATMEGA328P Module with integrated LoRa and CAN Bus
ATMEGA328P Module with integrated LoRa and CAN-BUSINTRODUCTIONIn my quest to perfect my LoRa telemet...
-
 Sx127x-Ra-02-Test-Module with ATMEGA328P-AU
SX127x LoRa/FSK/OOK Prototype Radio BoardI recently had a requirement to do some automation/telemetr...
Sx127x-Ra-02-Test-Module with ATMEGA328P-AU
SX127x LoRa/FSK/OOK Prototype Radio BoardI recently had a requirement to do some automation/telemetr...
-
 USB-ASP Programmer ATMEGA8
Build your own USB-ASP Programmer CloneBymakeriot2020 FEB 21, 2022 Arduino, ASP programmerUsing mor...
USB-ASP Programmer ATMEGA8
Build your own USB-ASP Programmer CloneBymakeriot2020 FEB 21, 2022 Arduino, ASP programmerUsing mor...
-
 ATTiny1616-LIGHT-Controller-with-CAN_B_PCB_ATTiny1616-LIGHT-Controller-with-C_2024-09-11
Assembly of the ATTiny1616 Can bus controller PCBThe Assembly of the ATTiny1616 Can Bus Controller P...
ATTiny1616-LIGHT-Controller-with-CAN_B_PCB_ATTiny1616-LIGHT-Controller-with-C_2024-09-11
Assembly of the ATTiny1616 Can bus controller PCBThe Assembly of the ATTiny1616 Can Bus Controller P...
-
 ATTiny1616QFN-CAN-Remote-Neopixel-Ligh_PCB_ATTiny1616QFN-CAN-Remote-Neopixel-2024-09-11_2024-09-11
NeoPixel CAN-Bus Module with local controlAs part of my current project to add NeoPixels to the cabi...
ATTiny1616QFN-CAN-Remote-Neopixel-Ligh_PCB_ATTiny1616QFN-CAN-Remote-Neopixel-2024-09-11_2024-09-11
NeoPixel CAN-Bus Module with local controlAs part of my current project to add NeoPixels to the cabi...
-
 PCB_MCP23008_2023-10-08
MCP23008 BreakoutI designed this breakout to assist me during prototyping my next version of the “RP...
PCB_MCP23008_2023-10-08
MCP23008 BreakoutI designed this breakout to assist me during prototyping my next version of the “RP...
-
 PCB_XiaoRP2040-Mouse-REV2
Xiao RP2040 Joystick Mouse – revision 2.00Revision 1.0 of the ProjectOver the last few months, I hav...
PCB_XiaoRP2040-Mouse-REV2
Xiao RP2040 Joystick Mouse – revision 2.00Revision 1.0 of the ProjectOver the last few months, I hav...
-
 Multi Purpose IO Card
Multi-Purpose IO CardWhen we are working on a prototype, we always need access to pushbuttons, encod...
Multi Purpose IO Card
Multi-Purpose IO CardWhen we are working on a prototype, we always need access to pushbuttons, encod...
-
 Variable Voltage Power Module
Variable Voltage Power ModulePowering electronics projects are always challenging. This Variable vol...
Variable Voltage Power Module
Variable Voltage Power ModulePowering electronics projects are always challenging. This Variable vol...
-
 I2C Matrix Keypad
An I2C Matrix KeypadThe completed I2C Matrix KeypadIn a previous post this month I introduced my 4×4...
I2C Matrix Keypad
An I2C Matrix KeypadThe completed I2C Matrix KeypadIn a previous post this month I introduced my 4×4...
-
 ESP32-S Development Board, in "Arduino Uno" form factor
UPDATE 24/06/2023:This board now has a Hardware Revision 2.0 available. It is the same board but wit...
ESP32-S Development Board, in "Arduino Uno" form factor
UPDATE 24/06/2023:This board now has a Hardware Revision 2.0 available. It is the same board but wit...
-
 W307186ASC94_Gerber_PCB_USB-Ports
USB Power Supply ModuleUSB Ports are quite handy to power all our day-to-day electronic devices, but...
W307186ASC94_Gerber_PCB_USB-Ports
USB Power Supply ModuleUSB Ports are quite handy to power all our day-to-day electronic devices, but...
-
 Atmega 328P based PWM controller Card
ATMega 328P Based PWM controller CardAs part of my recent ESP-12E I2C Base Board project, I designed...
Atmega 328P based PWM controller Card
ATMega 328P Based PWM controller CardAs part of my recent ESP-12E I2C Base Board project, I designed...
-
 W307186ASC71_Gerber_PCB_ESP-Now Remote
Today we will look at the remote control unit for the Robotic Toy Car – Part 6.The project is close ...
W307186ASC71_Gerber_PCB_ESP-Now Remote
Today we will look at the remote control unit for the Robotic Toy Car – Part 6.The project is close ...
-
 W307186ASV69_Gerber_PCB_Robot-Car-MCU-Board Prototype
In our last project, we started working on repurposing an old toy car. In this part, Robot Toy Car –...
W307186ASV69_Gerber_PCB_Robot-Car-MCU-Board Prototype
In our last project, we started working on repurposing an old toy car. In this part, Robot Toy Car –...
-
 W307186ASV62_Gerber_PCB_DUAL-H-Bridge
by makeriot2020 on May 27, 2022Many of us have old toys laying around the house, they belong to ou...
W307186ASV62_Gerber_PCB_DUAL-H-Bridge
by makeriot2020 on May 27, 2022Many of us have old toys laying around the house, they belong to ou...
-
 CAN-BUS Breakout
Breadboard Compatible CAN-BUS Breakout ModuleWhat is this:Some of us have already used the commonly ...
CAN-BUS Breakout
Breadboard Compatible CAN-BUS Breakout ModuleWhat is this:Some of us have already used the commonly ...
-
RA-02 Breakout with Level converters
Breadboard and beginner-friendly RA-02 Breakout ModuleMost Makers and electronics enthusiasts may al...
-
ATMEGA328P Module with integrated LoRa and CAN Bus
ATMEGA328P Module with integrated LoRa and CAN-BUSINTRODUCTIONIn my quest to perfect my LoRa telemet...
-
Sx127x-Ra-02-Test-Module with ATMEGA328P-AU
SX127x LoRa/FSK/OOK Prototype Radio BoardI recently had a requirement to do some automation/telemetr...
-
USB-ASP Programmer ATMEGA8
Build your own USB-ASP Programmer CloneBymakeriot2020 FEB 21, 2022 Arduino, ASP programmerUsing mor...
-
ATTiny1616-LIGHT-Controller-with-CAN_B_PCB_ATTiny1616-LIGHT-Controller-with-C_2024-09-11
Assembly of the ATTiny1616 Can bus controller PCBThe Assembly of the ATTiny1616 Can Bus Controller P...
-
ATTiny1616QFN-CAN-Remote-Neopixel-Ligh_PCB_ATTiny1616QFN-CAN-Remote-Neopixel-2024-09-11_2024-09-11
NeoPixel CAN-Bus Module with local controlAs part of my current project to add NeoPixels to the cabi...
-
PCB_MCP23008_2023-10-08
MCP23008 BreakoutI designed this breakout to assist me during prototyping my next version of the “RP...
-
PCB_XiaoRP2040-Mouse-REV2
Xiao RP2040 Joystick Mouse – revision 2.00Revision 1.0 of the ProjectOver the last few months, I hav...
-
Multi Purpose IO Card
Multi-Purpose IO CardWhen we are working on a prototype, we always need access to pushbuttons, encod...
-
Variable Voltage Power Module
Variable Voltage Power ModulePowering electronics projects are always challenging. This Variable vol...
-
I2C Matrix Keypad
An I2C Matrix KeypadThe completed I2C Matrix KeypadIn a previous post this month I introduced my 4×4...
-
ESP32-S Development Board, in "Arduino Uno" form factor
UPDATE 24/06/2023:This board now has a Hardware Revision 2.0 available. It is the same board but wit...
-
Modifying a Hotplate to a Reflow Solder Station
210 0 2 -
MPL3115A2 Barometric Pressure, Altitude, and Temperature Sensor
170 0 1 -
-
-
V2 Commodore AMIGA USB-C Power Sink Delivery High Efficiency Supply Triple Output 5V ±12V OLED display ATARI compatible shark 100W
422 4 1 -
How to measure weight with Load Cell and HX711
439 0 3 -
-
Instrumentation Input, high impedance with 16 bit 1MSPS ADC for SPI
543 0 0






















