






68k-MBC: a 3 ICs 68008 homebrew computer
* * DESCRIPTION * *
The 68k-MBC is an easy to build 68008 CPU SBC (Single Board Computer), using only easy to find TH parts.
It follows the same "concept" of the previous Z80-MBC2 (https://hackaday.io/project/159973) and V20-MBC (https://hackaday.io/project/170924) boards, using a PIC18F47Q10 MCU as EEPROM and "universal" I/O emulator (so a "legacy" EPROM programmer is not needed).
You can choose between two main HW configuration options: Lite or Full. Lite HW configuration option allows to build a 3 ICs 68008 system running CP/M-68K.
It has an optional on board 16x GPIO expander, and uses common cheap add-on modules for the SD (HD emulation) and the RTC options.
Having two onboard RS232 serial ports, it allows to connect RS232 terminals like uTerm-S (https://hackaday.io/project/176716).



* * THE PROTOTYPE * *
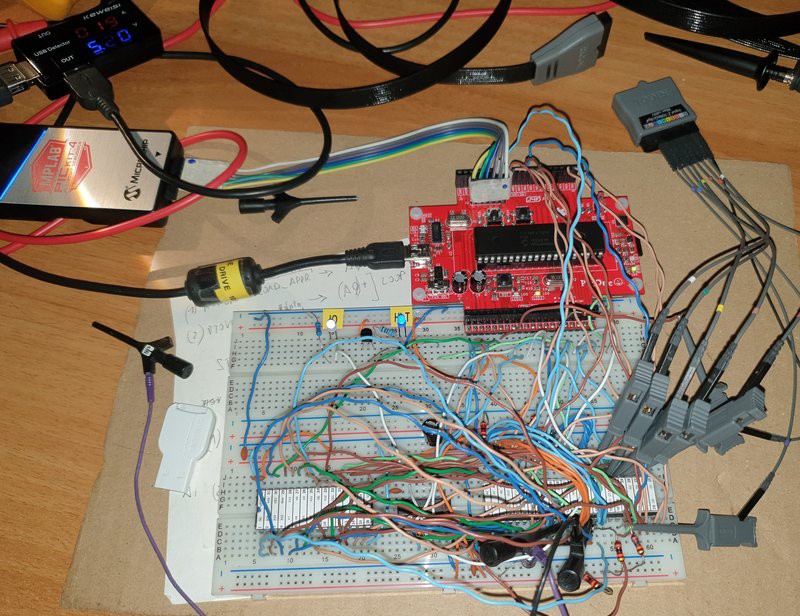
In the first phase of the design I've used a prototype on a breadboard to check the basic "concepts".
I've used as "companion" MCU a PIC18F47Q10 on a custom board (PicOne) I previously made and that it is directly pluggable on breadboards, and with onboard microSD card and USB-serial adapter.:
To make the firmware for the PIC18F47Q10 I've used MPLAB X IDE with the MCC plugin.
Here a short video with an automated assembler toolchain using Easy68K as assembler and sLoad, a custom SW utility to load from the serial port and execute a Motorola S-record formatted executable:
To allow a real automated toolchain an auto-reset circuit on the breadboard takes the DTR signal from the serial-USB adapter and uses it to reset the MCU (like in the Arduino Uno board), so it is possible reset the breadboard from a batch file running in the PC using a macro of Tera Term.
* * WHY A PIC? * *
Those have followed the previous Z80-MBC2 and V20-MBC boards will note that I haven’t used here an Atmega MCU. Using an Atmega MCU allows to use the friendly Arduino IDE and many ways to flash the MCU, so this is an enabling factor.
Unfortunately Atmega MCU GPIO ports are not TTL compatible, and this limitation was solved in the previous boards using a CMOS CPU that under given conditions can accomplish the digital levels of the Atmega MCU.
But here the 68008 CPU isn’t available in CMOS technology at all, so an Atmega MCU cannot be used.
So I’ve done some searches to find an alternative MCU having three main constraints: must have TTL compatible GPIOs, must be a TH part and cheap too.
The only part I’ve found was a PIC18F47Q10 MCU, and I must say that it accomplish the previous constrains very well. More, it is a modern MCU with lot of interesting features and more flash and RAM memory than the previous Atmega32 MCU.
Of course nothing comes free, and the choice of a PIC18F47Q10 brings some complexities. The first is the need of an appropriate HW programmer to flash it. The second is the constraint to use a proprietary IDE (MPLAB X) to write or modify the source that is more complex to use than the Arduino IDE (but I must say a lot more powerful…).
Those wanting make modifications to the firmware will have to install the MPLAB X IDE and learn to use it. MPLAB X is a professional tool, and with a lot of “power” comes a lot of complexity too… I hope this won’t be a problem, and after all learn to use a professional tool like MPLAB X IDE is always a good thing.
* * HARDWARE OVERVIEW * *
Here the 68k-MBC hardware main specs:
- 68008 CPU running at 8MHz;
- multi-boot capability;
- two main HW configuration options: Lite or Full. Lite HW configuration option allows to build a minimal 3 ICs 68008 system;
- RAM can be configured as 128/512/1024KB (1024KB supported on the Full HW configuration option only);
- optional RTC and microSD (HD emulation) modules (the same used in the Z80-MBC2);
- optional 16x GPIO port;
- I2C expansion port;
- 2 serial ports (serial port 2 supported on the Full HW configuration option only) ;
- on board RS232 drivers for both the two serial ports (Full HW configuration option only);
- serial-USB adapter support on the serial port 2 with independent power supply (Full HW configuration option only);
- User led and key;
- ICSP connector (for the PIC18F47Q10) for an easy firmware installation/upgrade;
- it is compatible with the uTerm (https://hackaday.io/project/165325) and uCom (https://hackaday.io/project/165709) add-on boards.
LITE/FULL HW CONFIGURATION OPTIONS
The 68k-MBC allows to choose between two main HW configuration options: Lite or Full. Lite HW configuration allows to build a minimal 3 ICs 68008 system.
The two HW configurations are quite different, and some signals behave in a complementary way. The IOS firmware checks which one HW configuration is used at first and changes the signals behavior accordingly (where needed).
The Lite HW configuration need less components populated than the Full one, with the only exception of one resistor (R4) that is needed only for the Lite HW configuration and is not needed with the Full HW configuration (anyway it will not "hurt" if present on the Full HW configuration).
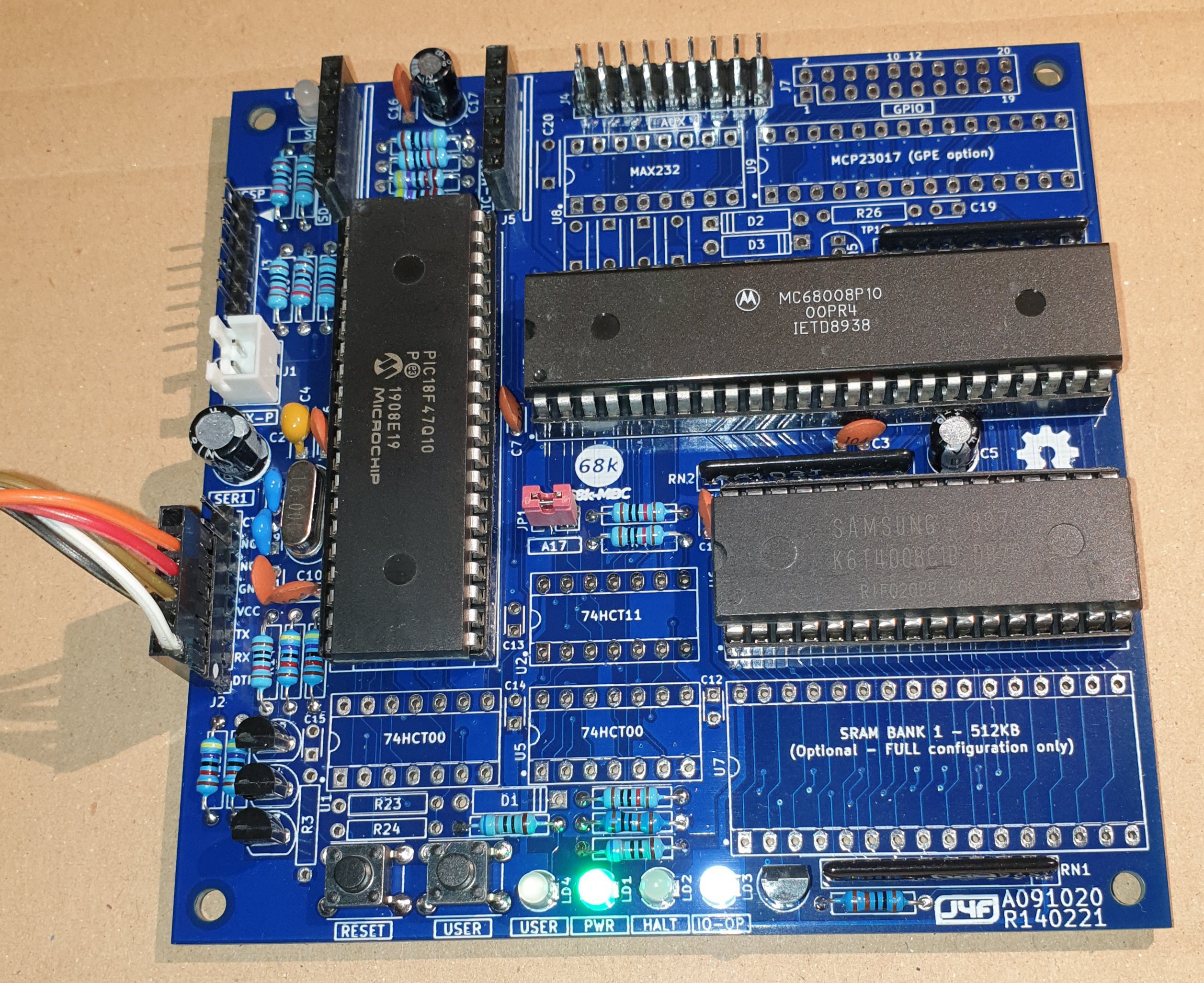
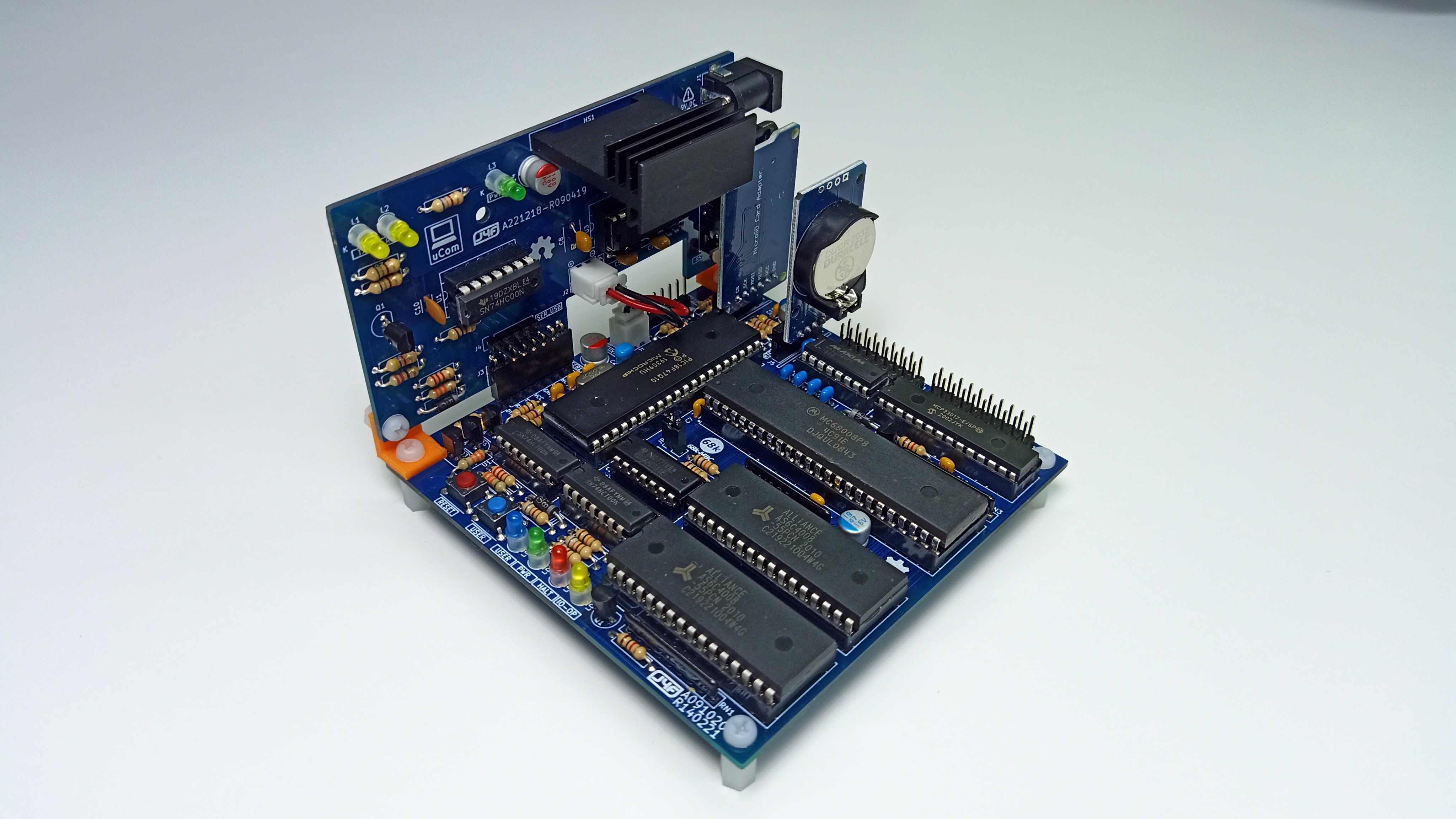
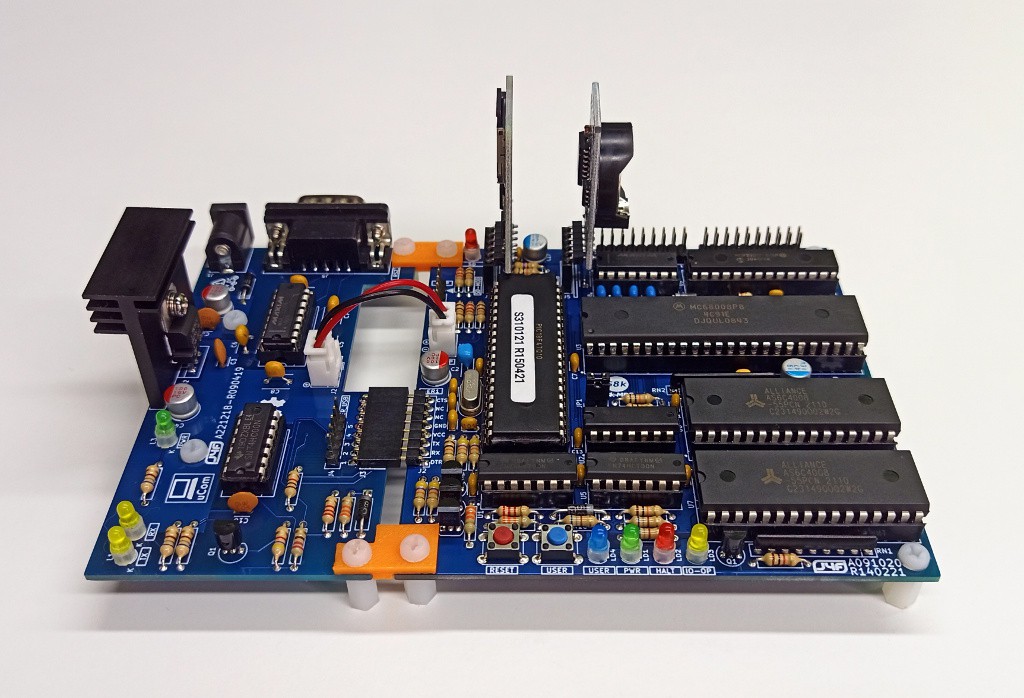
The following photo shows the 68k-MBC with the Lite configuration populated:
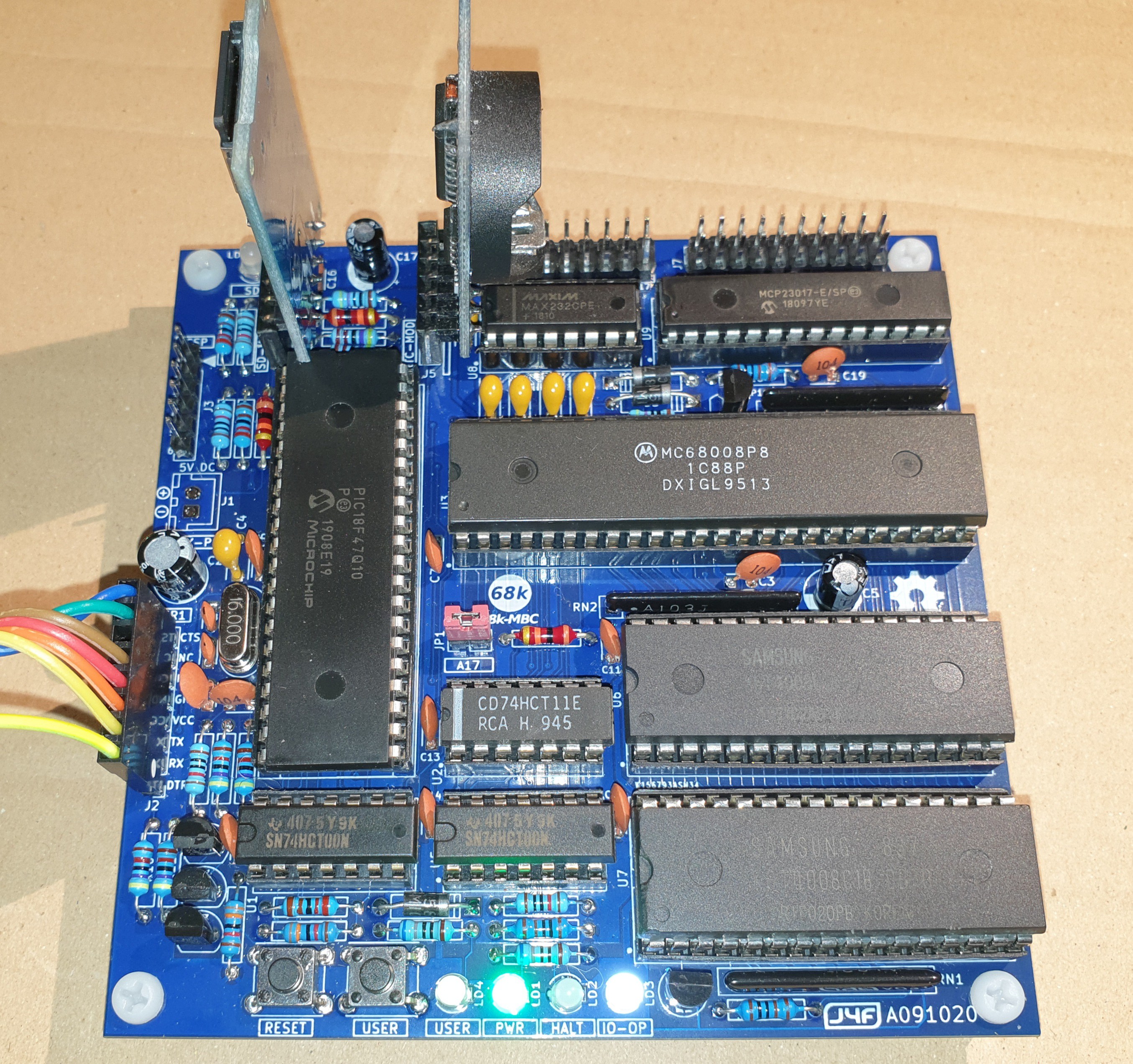
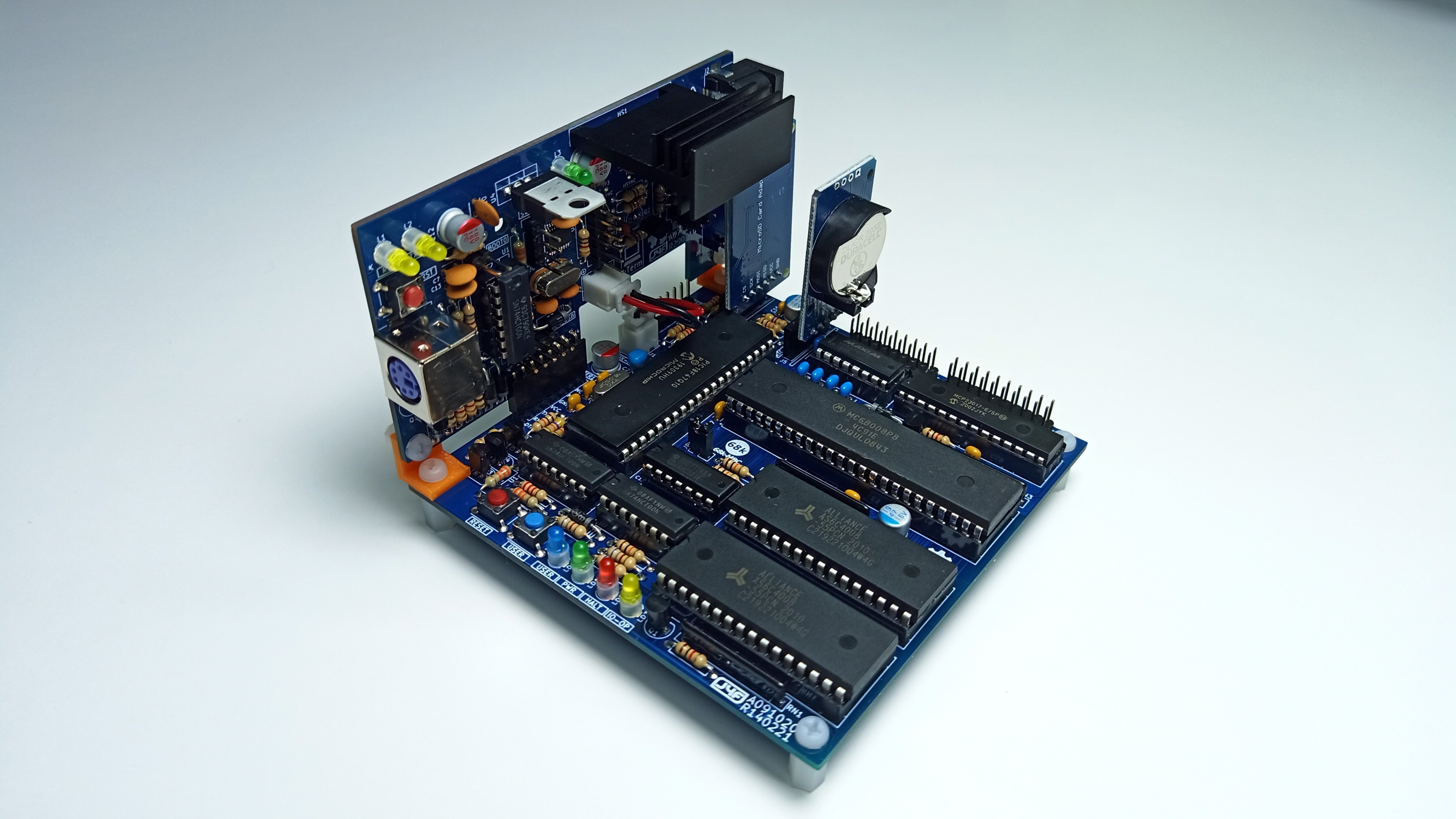
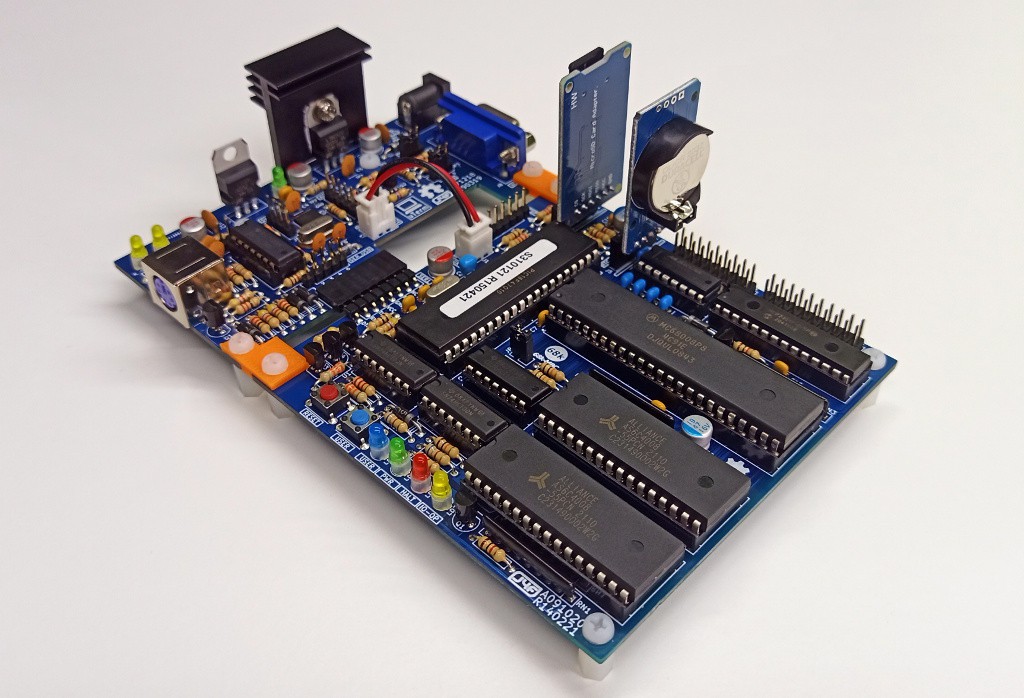
The following photo shows the 68k-MBC with the Full configuration populated (previous PCB revision):
To simplify the selection of the components a modular BOM shows the components needed for the two HW configurations.
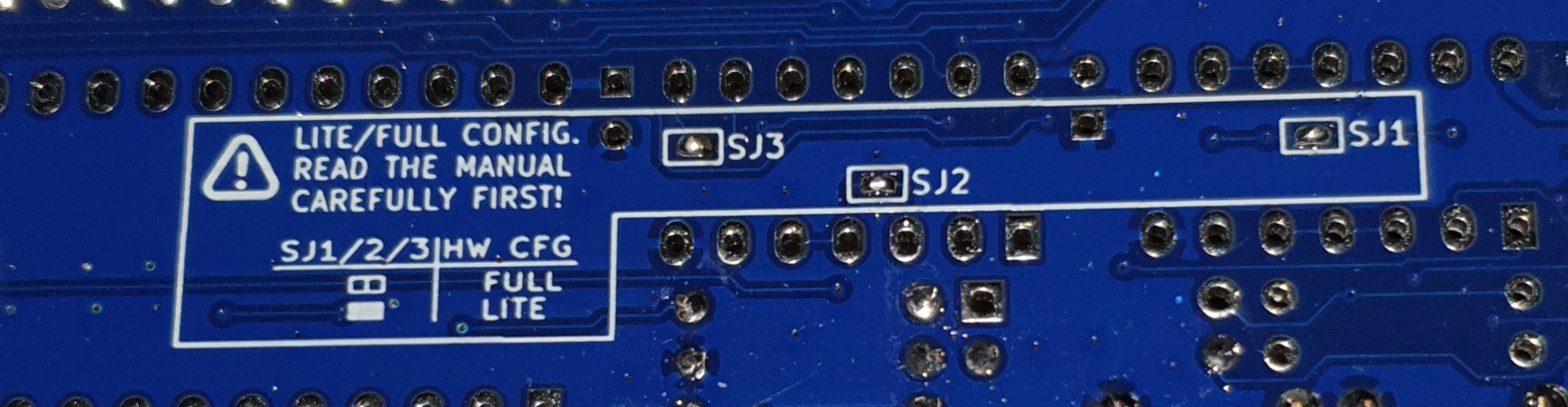
An important task to do at first is the configuration of the three solder jumpers (SJ1, SJ2, SJ3) in the bottom side of the PCB.
After you have chosen the wanted HW configuration to implement you must set the three solder jumpers SJ1, SJ2 and SJ3 in the following way:
- If you have chosen the Full HW configuration just leave all the three jumpers open;
- If you have chosen the Lite HW configuration all the three jumpers must be shorted.
WARNING: Permanent damages may occur if you don't follow the previous procedure as described!
WARNING: Permanent damages may occur if the three jumpers are shorted when U1, U2 and U5 are populated!
In the following photo SJ1, SJ2, and SJ3 are all shorted to enable the Lite HW configuration:
LIMITATIONS OF THE LITE HW CONFIGURATION OPTION
The Lite HW configuration option allows to build a 68008 system with a minimal BOM, but brings some limitations compared with the Full one:
- the 1024KB RAM configuration is not supported. Only 128/512KB are allowed;
- in the AUX connector only the I2C port is present;
- only the serial port 1 can be used (at the SER1 connector only);
- is not possible to use the CPU interrupts.
Anyway it can run all the provided SW, CP/M-68K included.
RAM CONFIGURATION
The supported RAM configurations are different for the two Lite/Full HW options.
The Full HW option allows three different RAM configurations:
- 128KB (1x128KB);
- 512KB (1x512KB);
- 1024KB (2x512KB).
To set the 128KB RAM configuration the JP1 jumper (A17) must be left open, while to set the 512KB or the 1024KB configuration JP1 must be closed.
This operation must be done when the board is not powered, and before the first power on with the RAM chips installed.
Please note that only a single RAM chip configuration is allowed when using 128KB RAM (2x128KB is not supported).
The Lite HW option supports 128KB and 512KB only, setting JP1 as for the Full one (the 1024KB RAM configuration is not supported for the Lite HW option).
THE SERIAL PORT 1 CONNECTOR (SER1/J2)
The SER1 port (J1) can be connected to a TTL-RS232 adapter or to a serial-USB adapter like the one (CP2102 based) in the following image:

This serial-USB adapter can act also as power source for the 68k-MBC, and has the DTR signal for the "autoreset" to trigger the upload of a S-record formatted stream when using the sLoad boot mode, enabling the implementation of an automated toolchain.
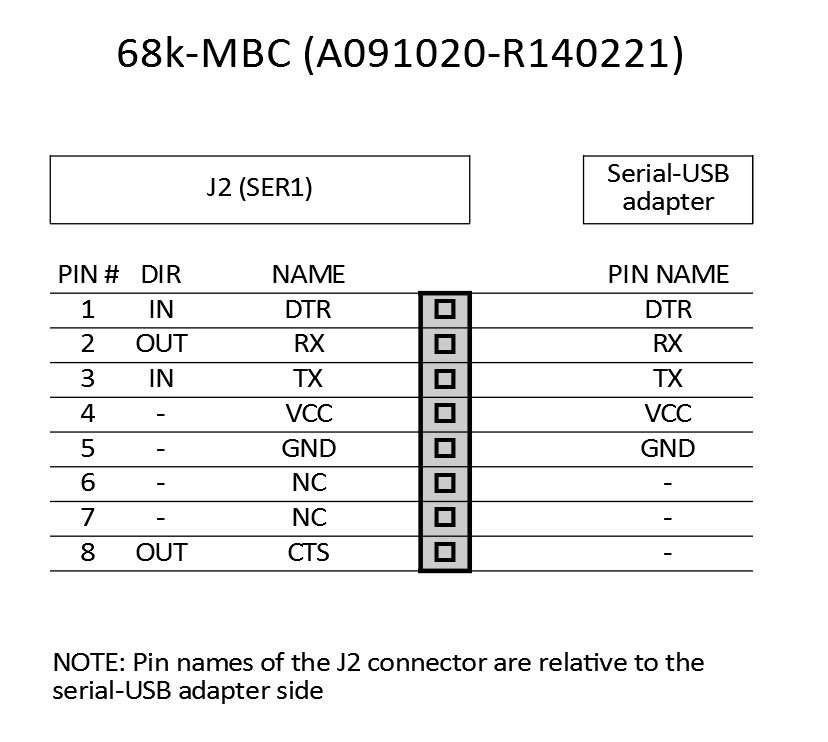
Note that the CTS pin of the SER1 port (J2) is not currently supported and must be left disconnected (as the NC pins) when using a serial-USB adapter.
Also the 3V3 pin of the serial-USB adapter must be left disconnected:
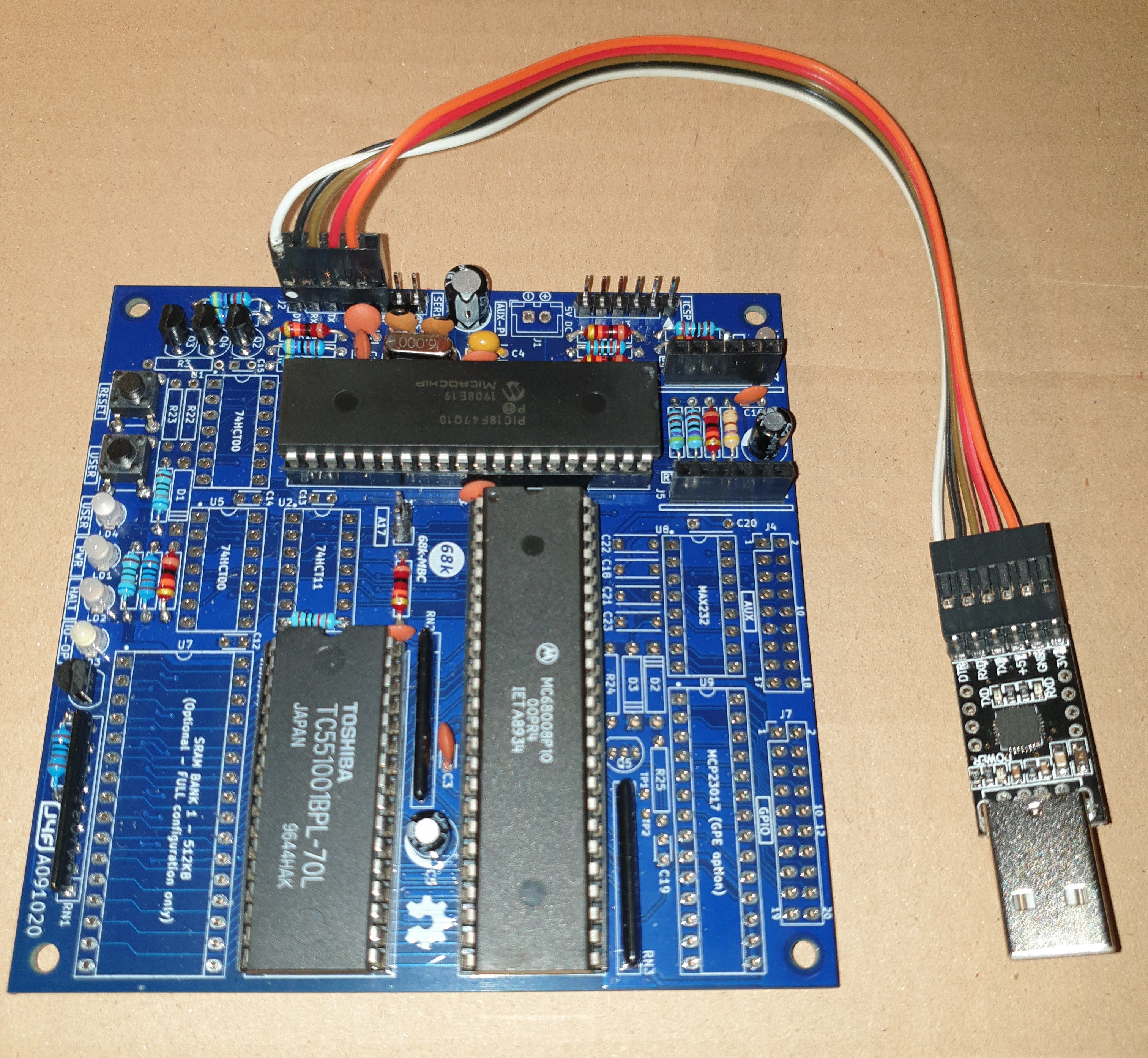
In the following table there is the pin mapping for J2 and how connect a serial-USB adapter:
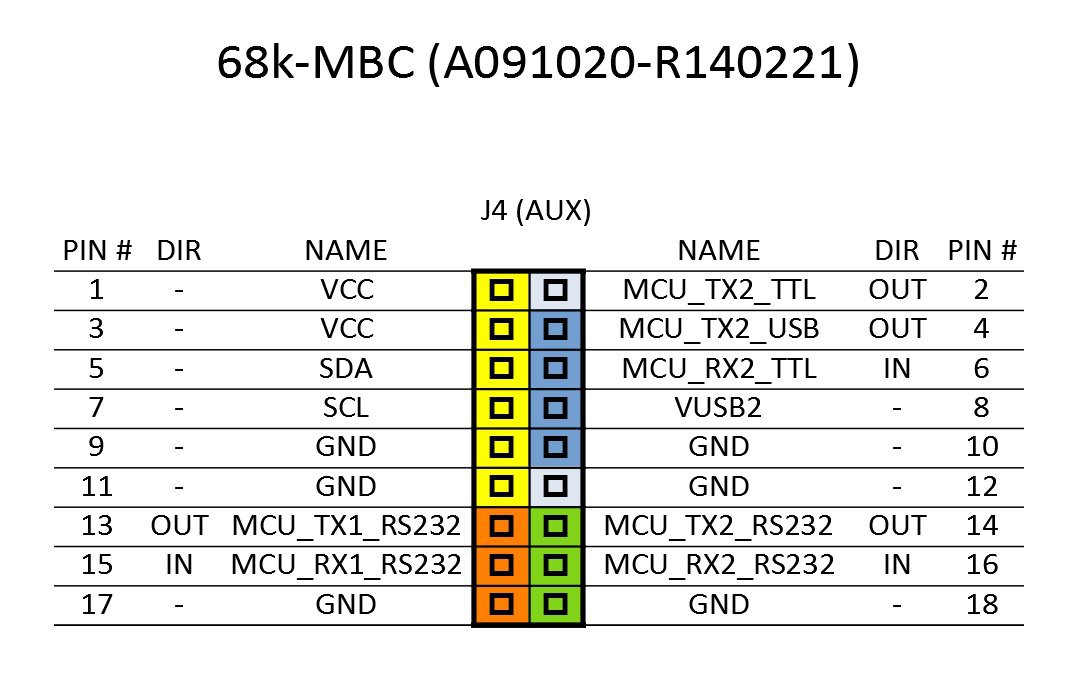
THE AUX CONNECTOR (AUX/J4)
The AUX (J4) connector expands the IOEXP connector used in the previous boards (V20-MBC and Z80-MBC2), supporting both the two serial ports with RS232 levels, the I2C port, the TTL level serial 2 port and a serial-USB adapter for the serial 2 with independent power.
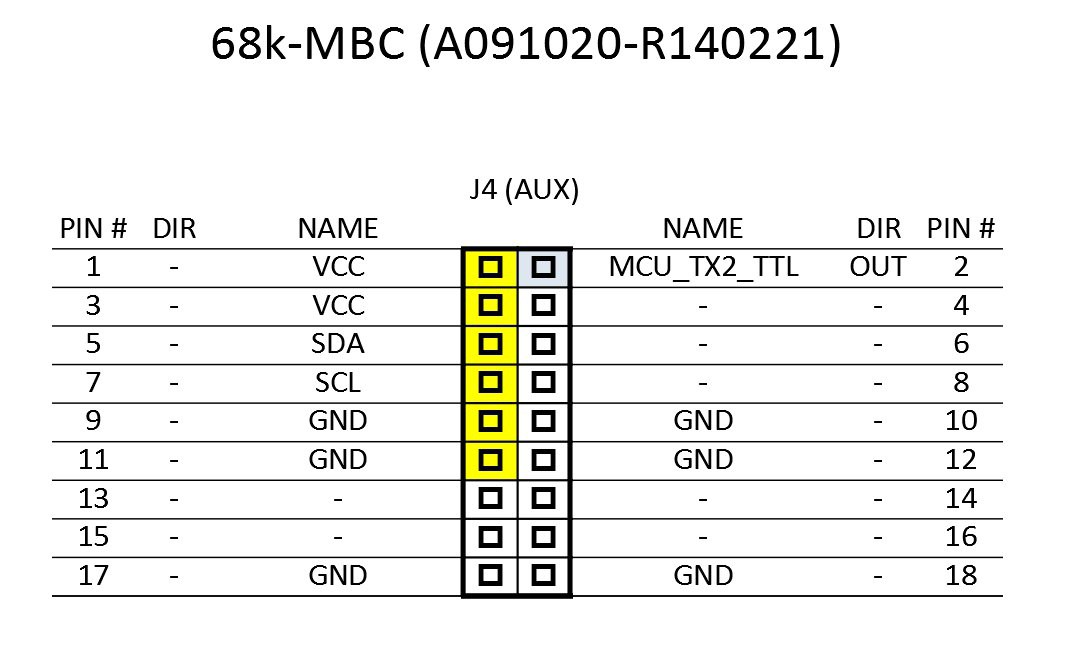
The are two different pin mapping for the two Lite/Full HW option configurations (Lite supports only a few pins).
The J4 pin mapping for the Full HW option is the following:
The J4 pin mapping for the Lite HW option is the following:
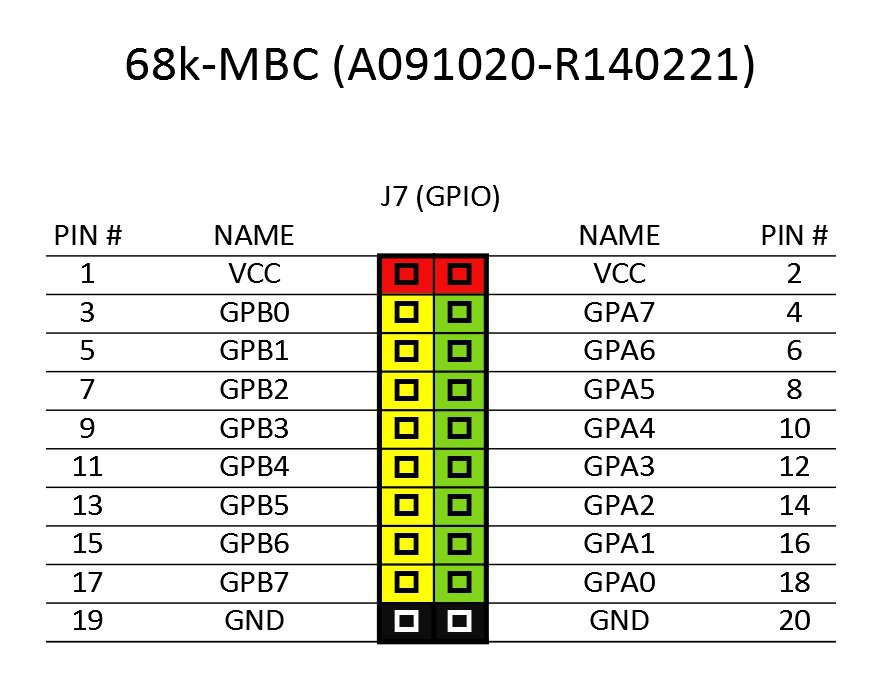
THE GPIO CONNECTOR (GPIO/J7)
THE OPTIONAL SD MODULE
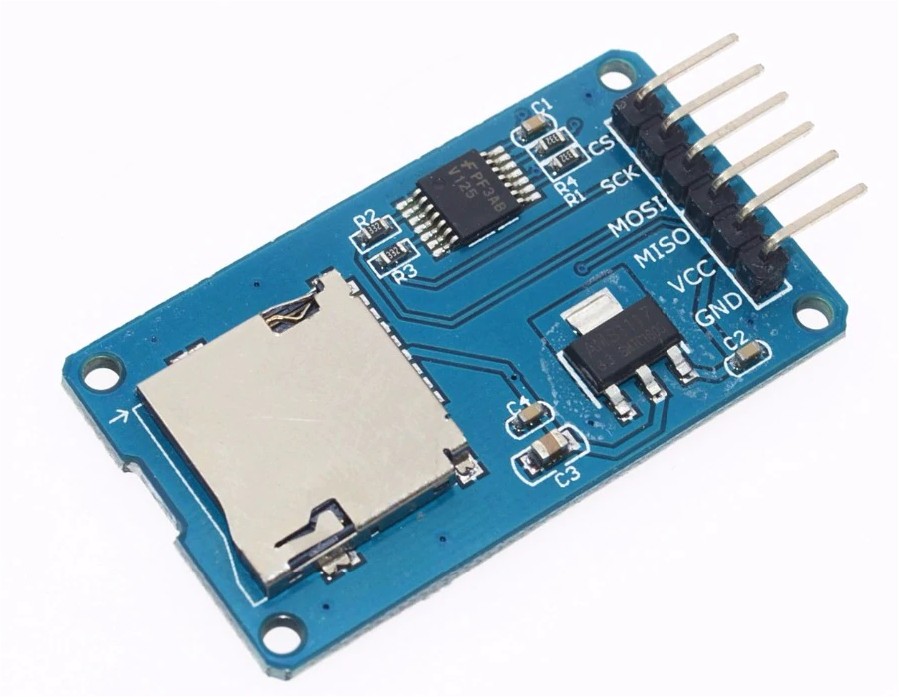
The optional SD module is used as HD emulation. The module is a common 6 pins microSD module that can be easily found on ebay:
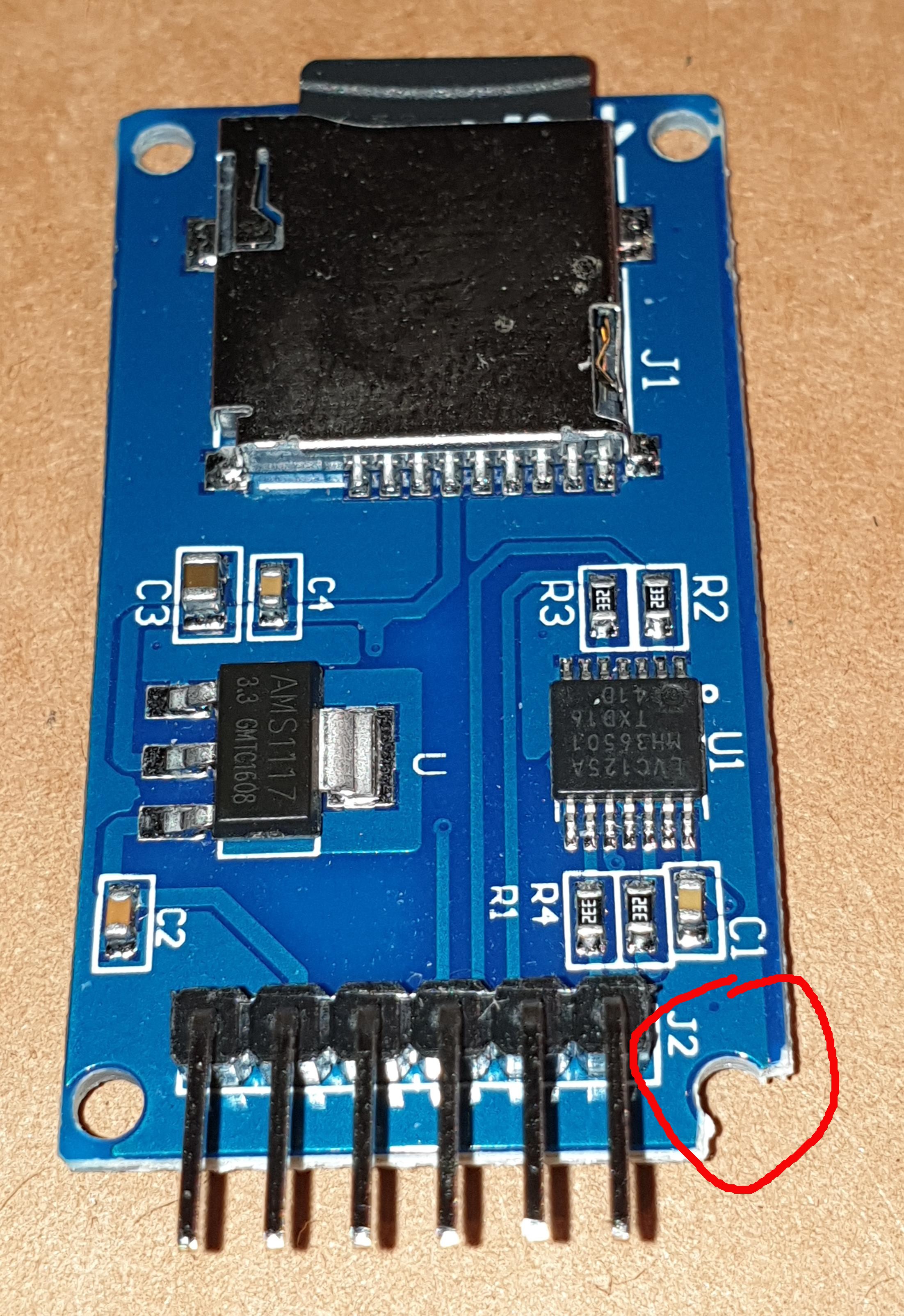
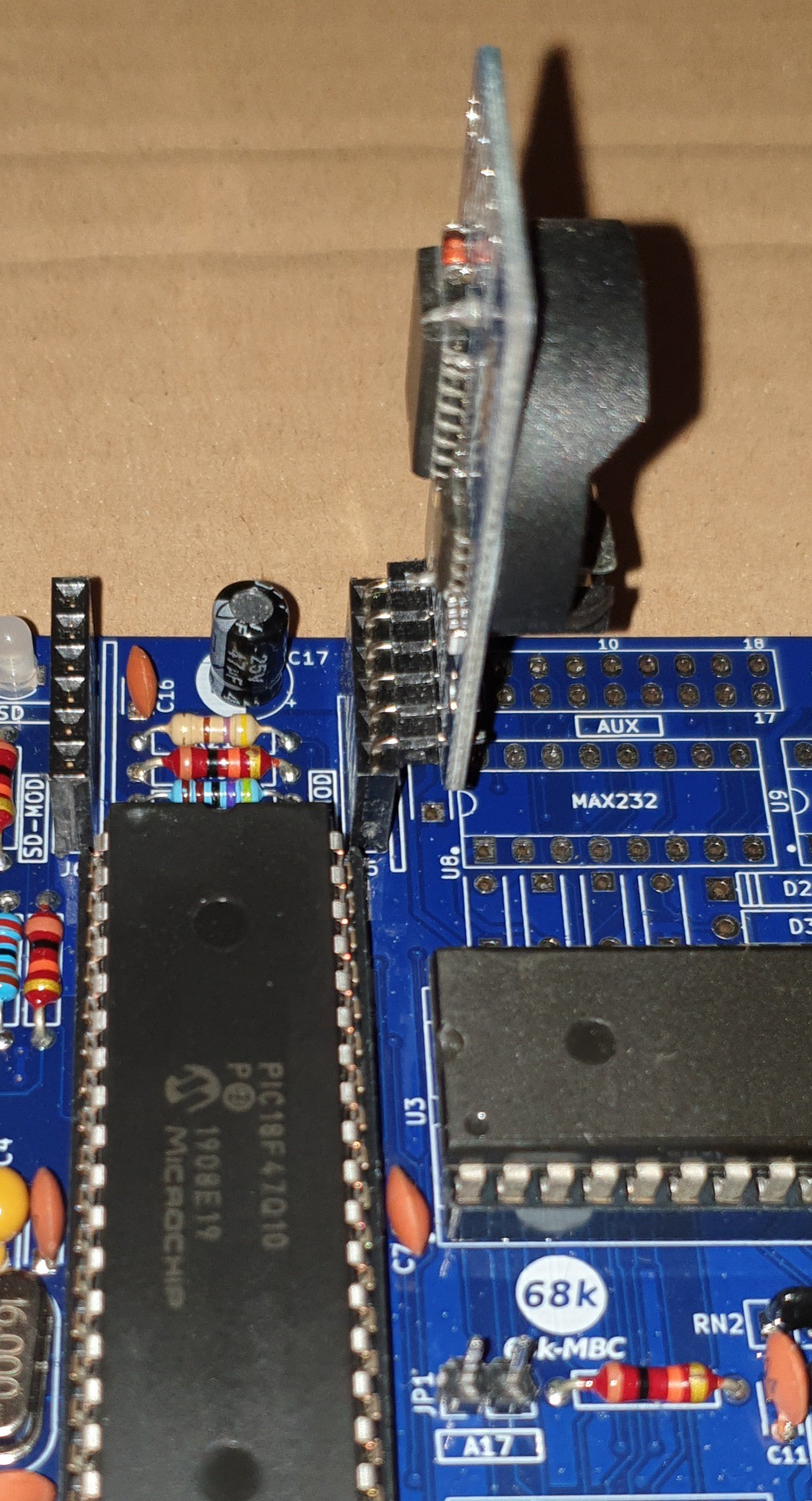
If a socket is used for the PIC MCU, a little cut is required to allow a good insertion into the J6 connector.
The cut is in the right angle near the connector as shown in the following image:
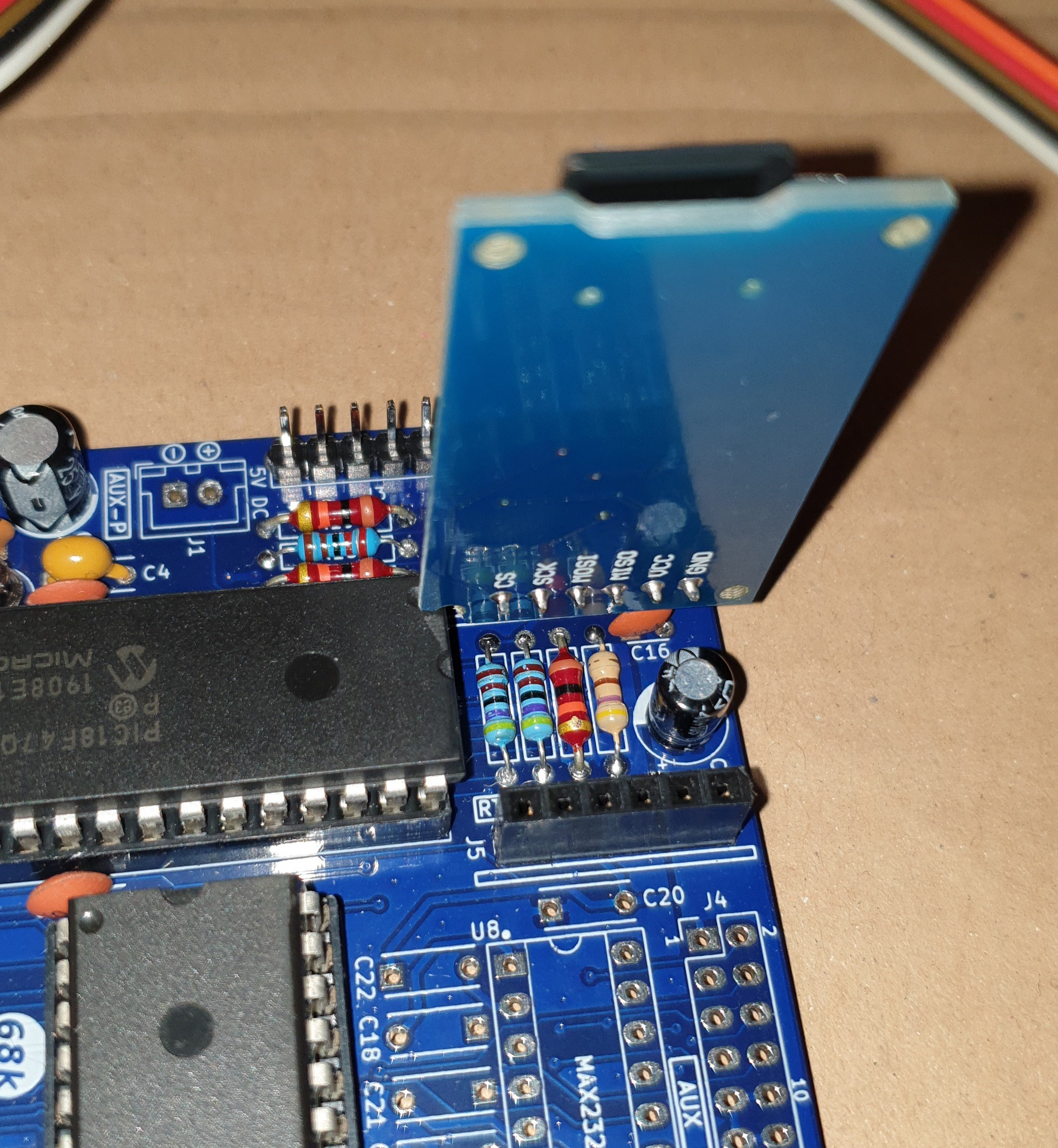
Pay attention on how and where you plug the module in (the only right connector for it is J6 marked as SD-MOD). If you plug it in the wrong connector or in the wrong way it is possible cause permanent damages to both the module and the 68k-MBC board! So plug it as shown in the following image:
THE OPTIONAL RTC MODULE
The RTC is a common module based on a DS3231 RTC like this one:
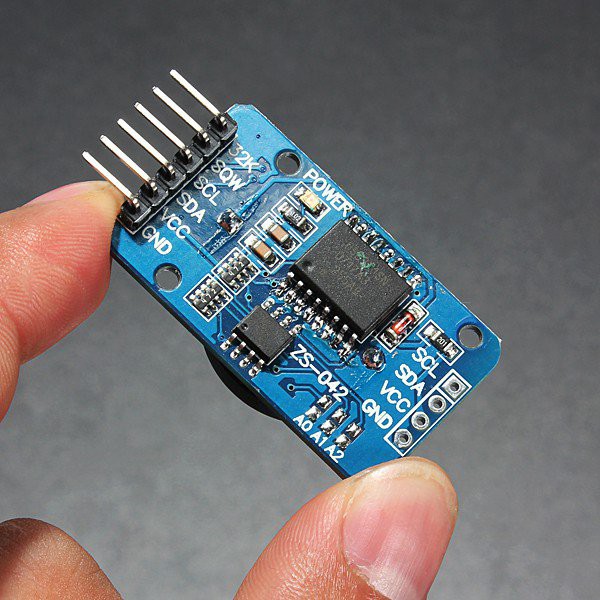
This cheap modules have a trickle charging circuit that may cause the "explosion" of the battery if you use a standard CR2032 cell. More, it can damage also a rechargeable LIR2032 cell. For more information and how to fix it see here.
The RTC module has it's own pullup resistors on SDA and SCL. Because the value is 4k7 (the same value used inside the 68k-MBC board), the resulting value will be:
4k7 // 4k7 = 2k3
Because this value is fine there is no need to take away the pullup on the RTC module.
Pay attention on how and where you plug the module in (the only right connector for it is J5 marked as RTC-MOD). If you plug it in the wrong connector or in the wrong way it is possible cause permanent damages to both the module and the 68k-MBC board! So plug it as shown in the following image:
ADD-ON BOARDS
The 68k-MBC is compatible with the uTerm (https://hackaday.io/project/165325) and uCom (https://hackaday.io/project/165709) add-on boards and the related 3D printed parts for a vertical or horizontal assembly:
Both the boards allow an optimal power supply for the 68k-MBC. In this case it is mandatory to use the AUX-P (J1) connector.
* * SOFTWARE OVERVIEW * *
The PIC18F47Q10 MCU is used as universal I/O subsystem, as Eeprom, and as reset and 8MHz clock generator for the 68008 CPU.
The software running into the PIC18F47Q10 is the IOS (Input Output Subsystem) written using MPLAB X IDE with the MCC plugin.
The IOS allows to interface the PIC18F47Q10 directly with the CPU system bus, emulating the needed I/O chips during the memory mapped I/O read, I/O write and IRQ acknowledge CPU bus cycles (see the 68008 datasheet).
In addition, the IOS loads the RAM during the boot phase, "feeding" the CPU with the necessary instructions to load the RAM.
If the "feeding" algorithm "sees" that there is an unexpected bus status, it aborts the boot sequence alerting with a message.
Because the 68008 CPU has a two-word instruction prefetch mechanism, the IOS takes care of this in the "feeding" algorithm during the boot phase and appends at the end of the boot stage a STOP instruction to be sure that the CPU doesn't go further.
The parameters of the two serial ports emulated by the IOS are: 115200 baud, 8N1 with no flow control (anyway you can change the speed for both the two serial ports in the "Select boot mode or system parameters" menu).
Currently IOS allows to use the 68k-MBC in various scenarios:
- Running CP/M-68k as a stand-alone computer;
- Running the stand-alone Basic interpreter (Enhanced 68K Basic);
- Using the sLoad boot mode as a "modern" embedded development board;
- Using the Autoboot boot mode to run a custom binary executable at power-on.
There are also various toolchains available as cross compiler:
- Cross Assembler with Easy68k (Windows);
- Cross Compiler with gcc (Linux);
- Cross Compiler using 68000 IDE (Windows).
All the details are explained in the following paragraphs.
FLASHING THE FIRMWARE WITH MPLAB IPE
One of the simplest way to flash the IOS firmware is probably to use the MPLAB IPE utility. I've used with it both the MPLAB PicKit 4 and MPLAB SNAP programmers:

To connect the programmer to the 68k-MBC you also need a simple 6 wire Dupont cable as the one in the previous photo, with female pin headers on a side and male pin headers on the other side. It is strongly recommended that you mark the pin 1 on both sides to avoid errors when connecting it.
In the next it is assumed to use MBLAB SNAP as a programming device. It is also assumed that MPLAB IPE is already installed and that you have read the MPLAB SNAP manual and are "familiar" with it.
STEP 1: You must connect the MPLAB SNAP programmer to the USB first (to power it), then connect it to the 68k-MBC board using the 6 wire cable at the ICSP connector. Please note that the 68k-MBC * must * be not powered in this phase.
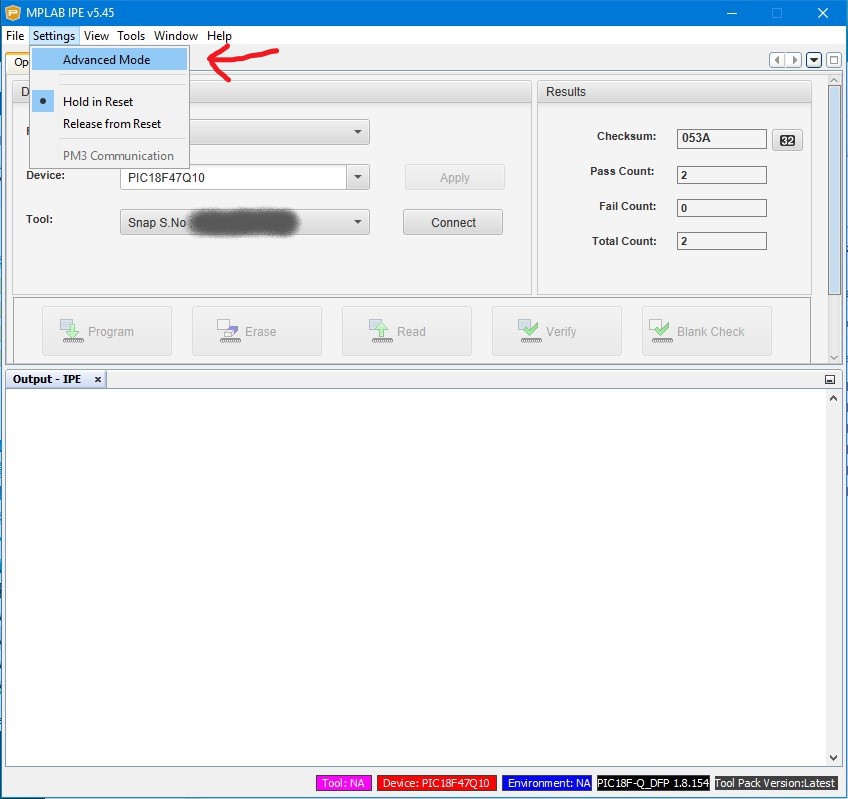
STEP 2: Now you can power the 68k-MBC board and then launch the MPLAB IPE utility. You have to select the Advanced Mode from the Setting menu:
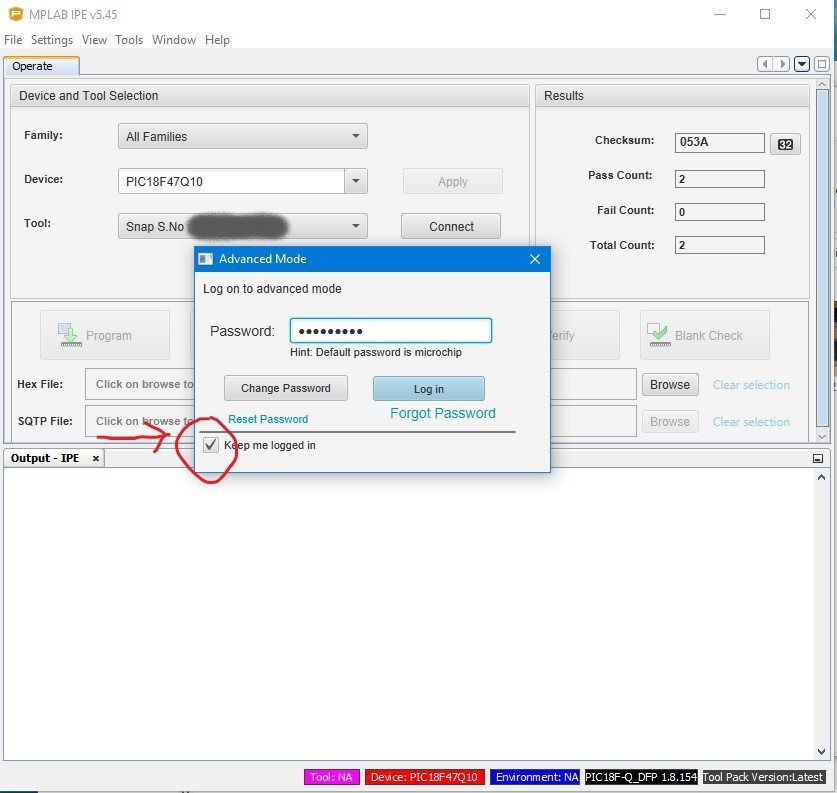
STEP 3: At this point you have to logon with the default password (microchip) checking the Keep me logged in option, so the "Advanced mode" will be the default mode:
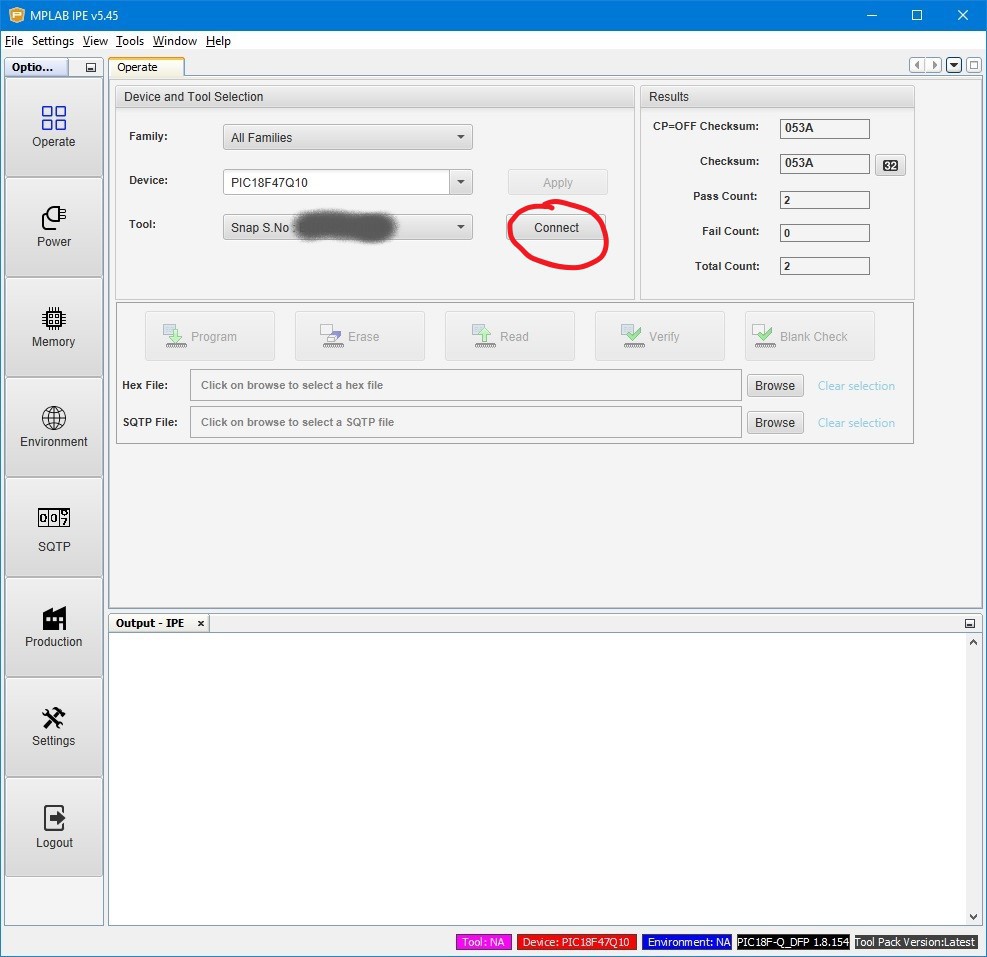
STEP 4: You have to press the Connect button to activate the programmer. The MPLAB IPE should select the right PIC MCU (PIC18F47Q10) at this point:
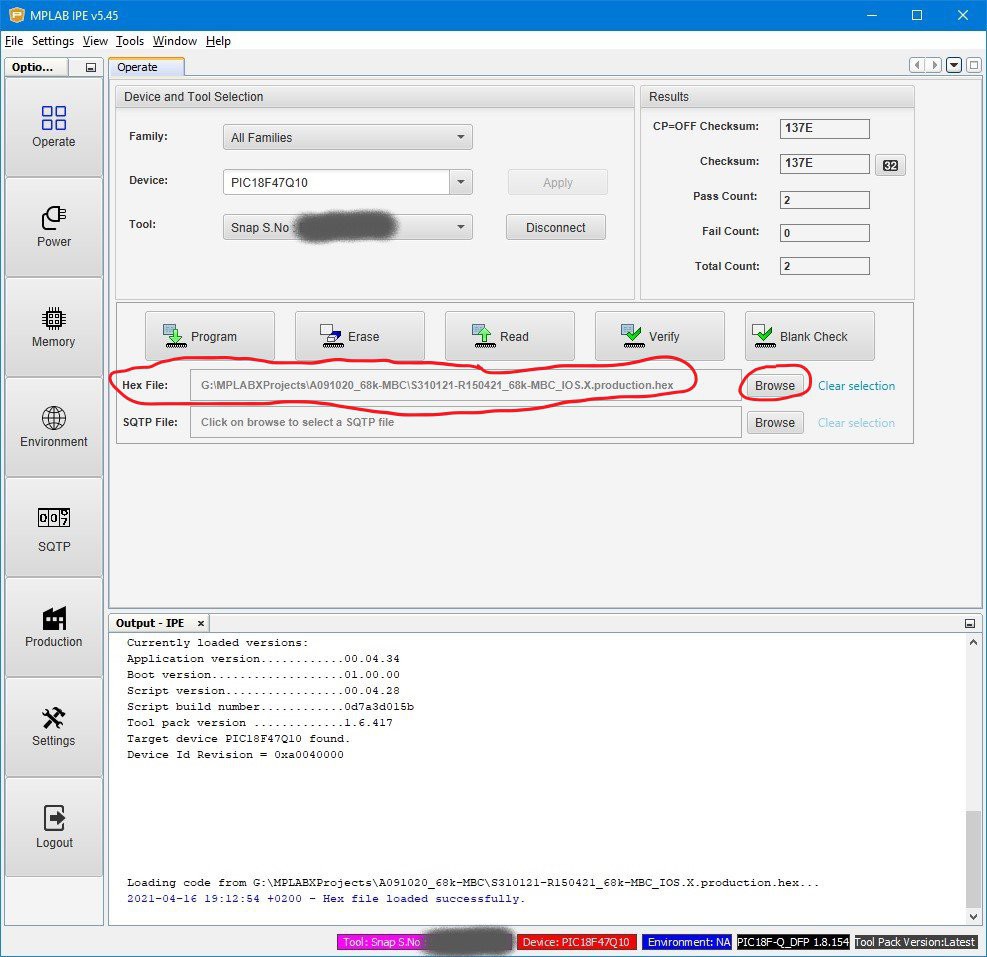
STEP 5: You have to select the .hex file to write inside the PIC, using the Browse button to choose it:
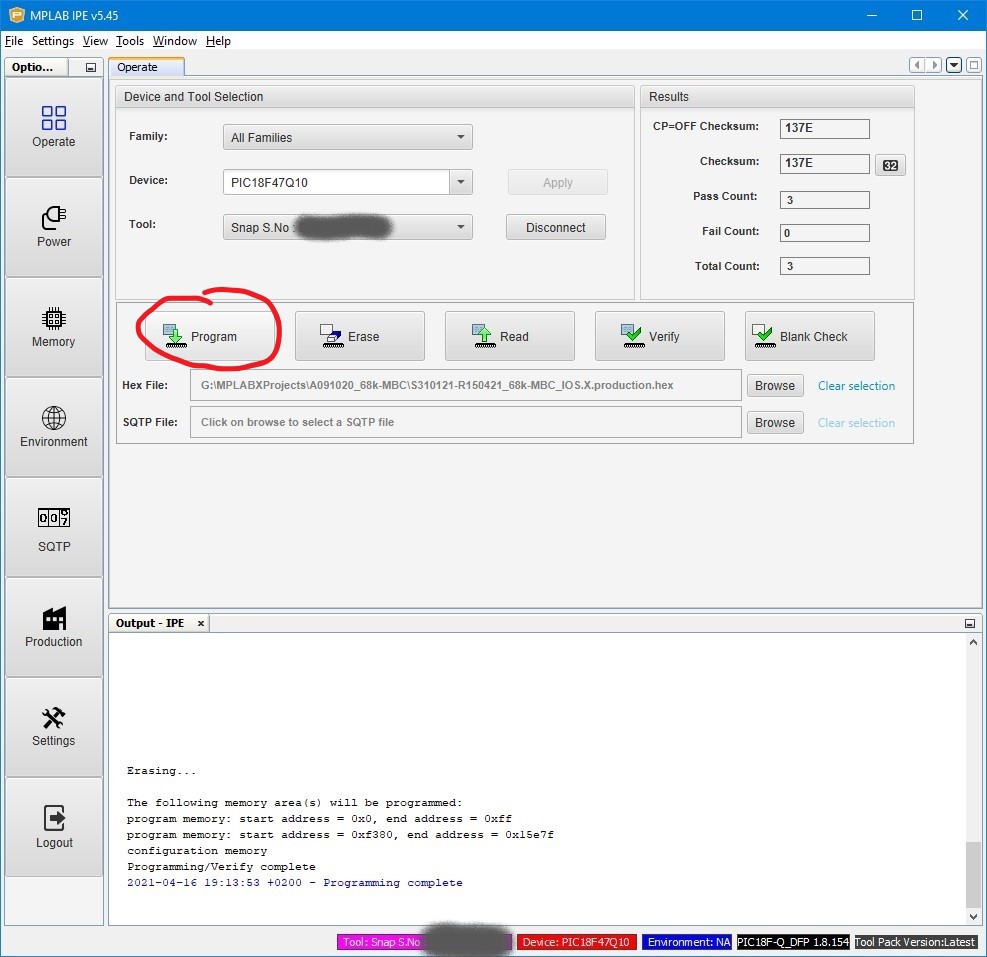
STEP 6: Now is time to write the .hex file into the PIC MCU pressing the Program button:
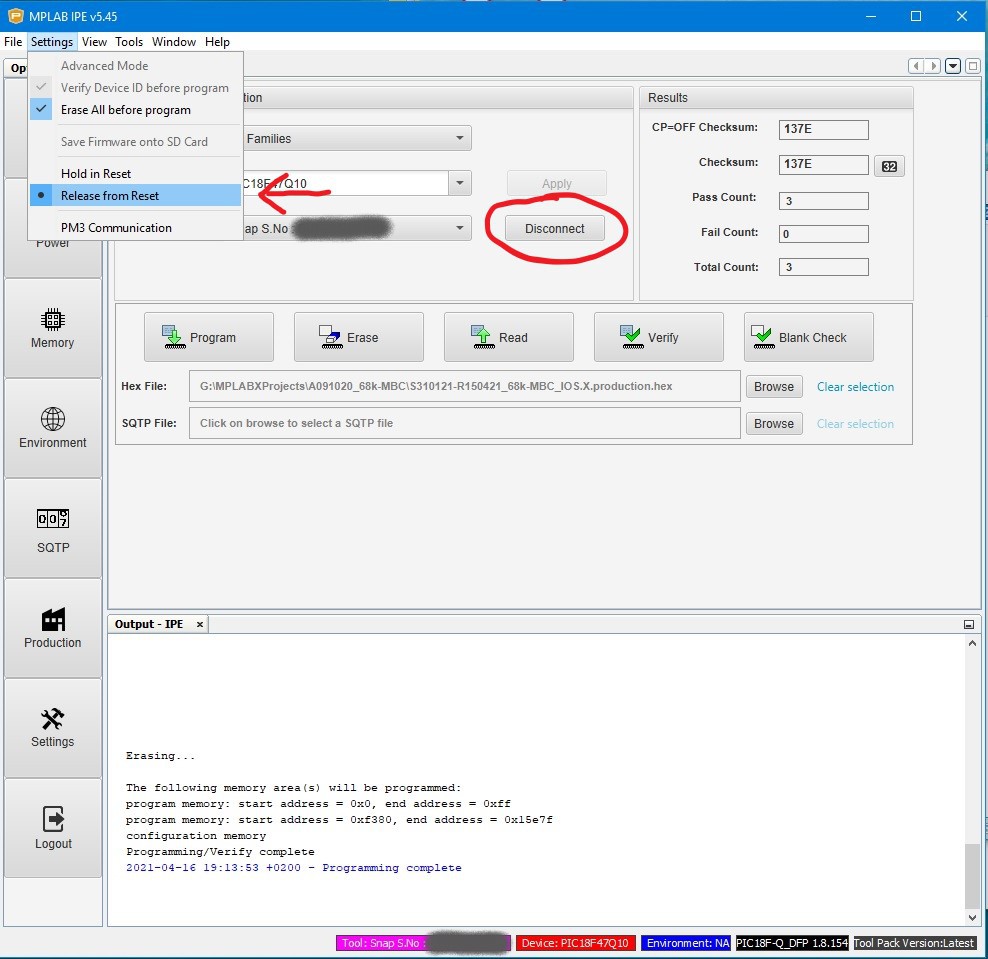
STEP 7: After the end of the programming you can optionally select Release from Reset if you want try to let the PIC MCU run to see the result. Consider that with the MPLAB SNAP programmer connected to the 68k-MBC the User key will be seen by the PIC MCU as permanently pressed. Then you have to press the Disconnect button:
STEP 8: Now you can (in this order) unpower the target board (68k-MBC), disconnect the ICSP cable from the J3 connector (of the 68k-MBC board) and finally disconnect the MPLAB SNAP programmer from the USB. All done.
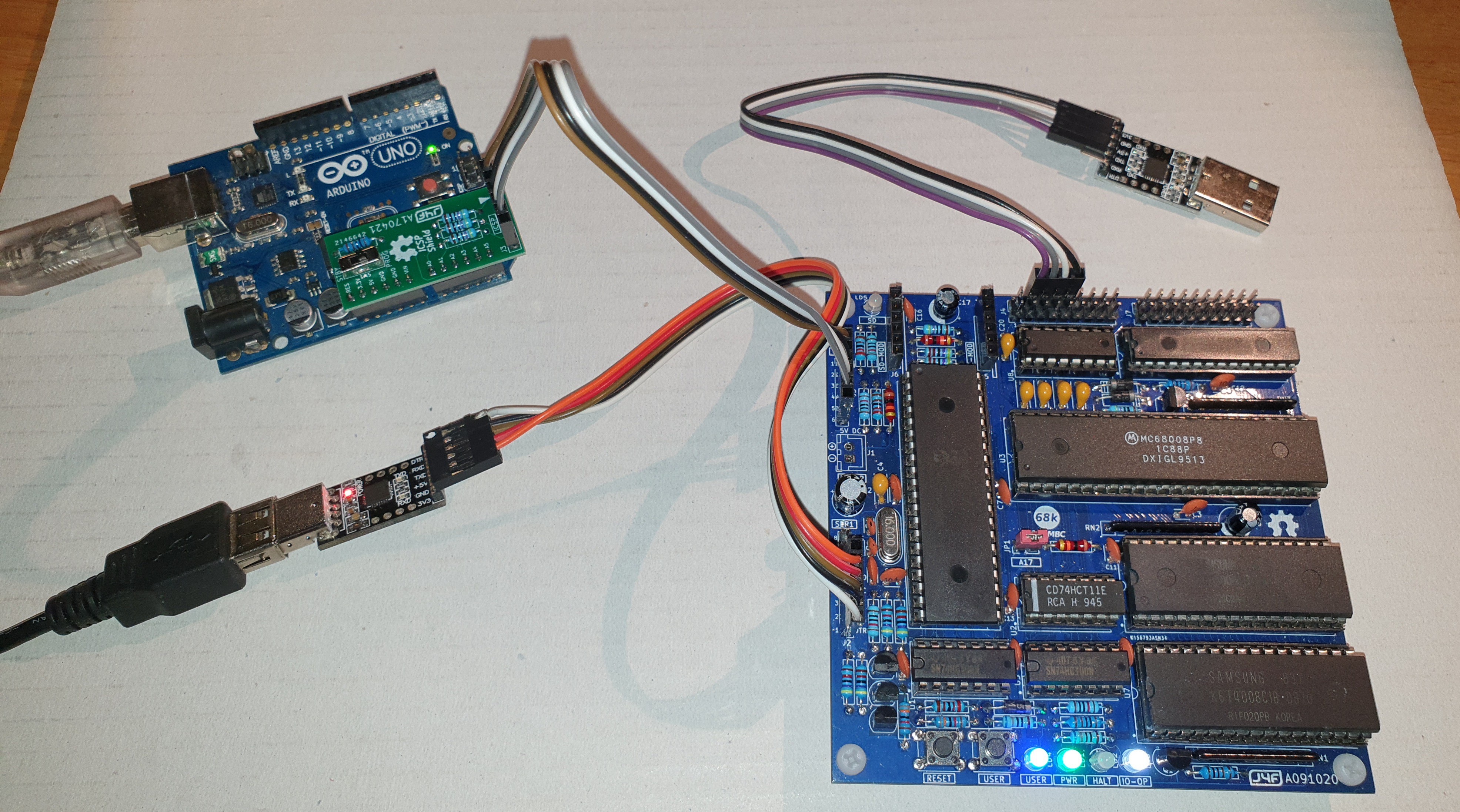
FLASHING THE FIRMWARE WITH AN ARDUINO UNO AS PROGRAMMER
Searching around for an alternative way to program the PIC MCU without the need of custom programmers, I've found this interesting project here and here that uses a common Arduino Uno board with a proper "control program" on the PC side.
So I've tested it (on a linux PC) and after a little modification it worked!
The modification was needed because the Device Id of the PIC18F47Q10 was exchanged with the one of a very similar device (PIC18F27Q10).
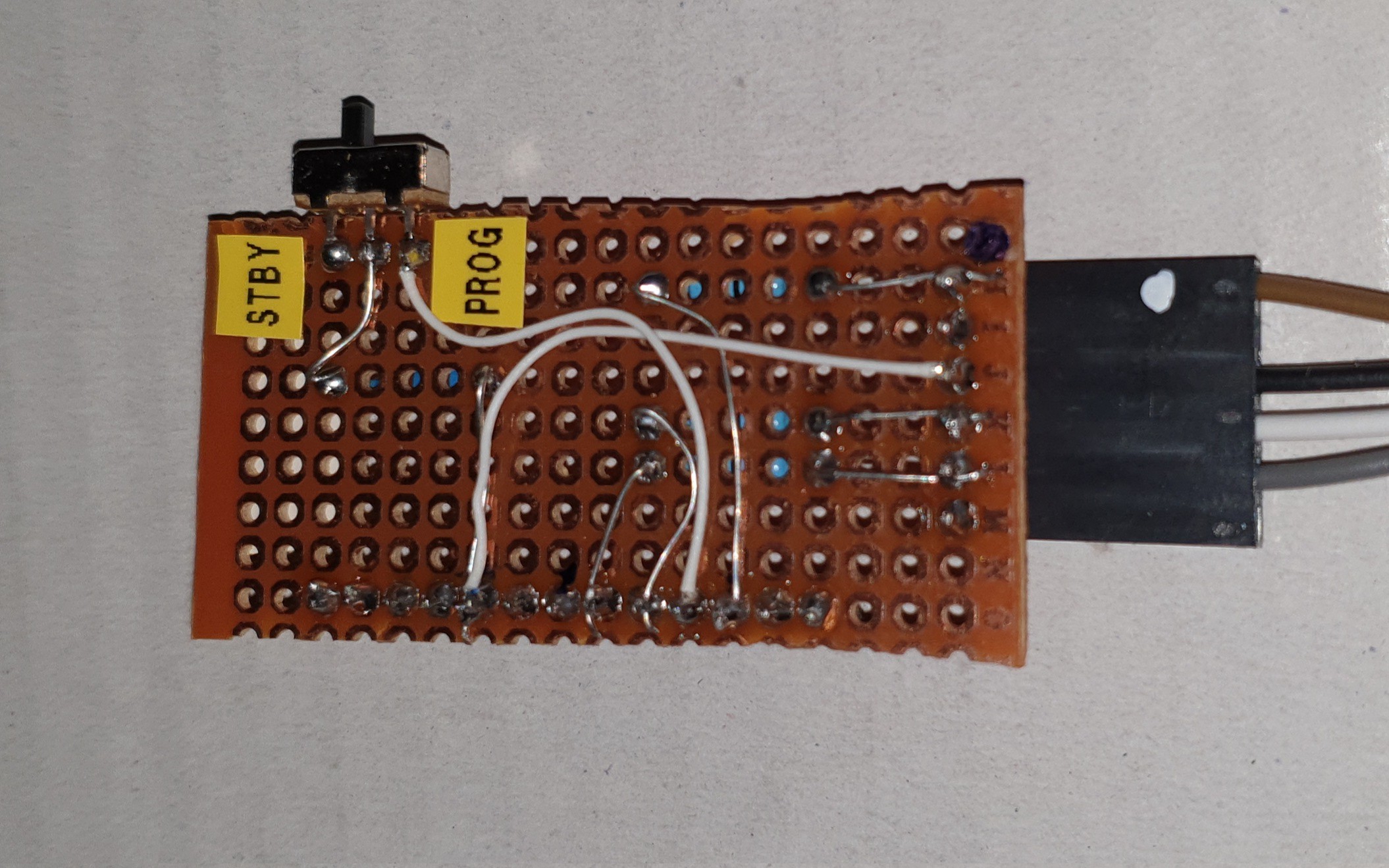
Another modification I've done is inside the .ino file to add a switch that holds the programmer in a "standby" state to allow a safer connection/disconnection to/from an unpowered target board. When the programmer is in this state the Arduino Uno built-in led is blinking.
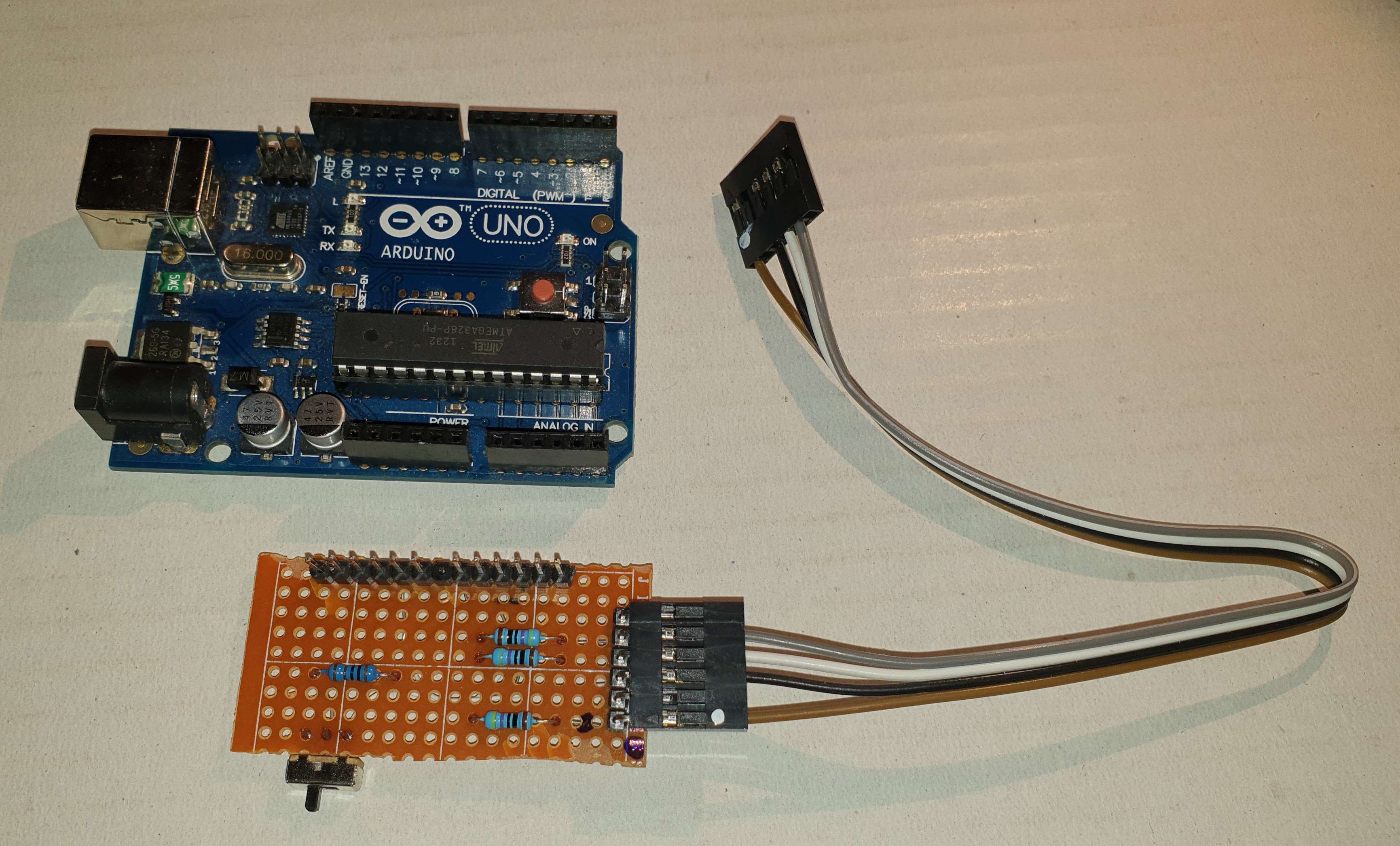
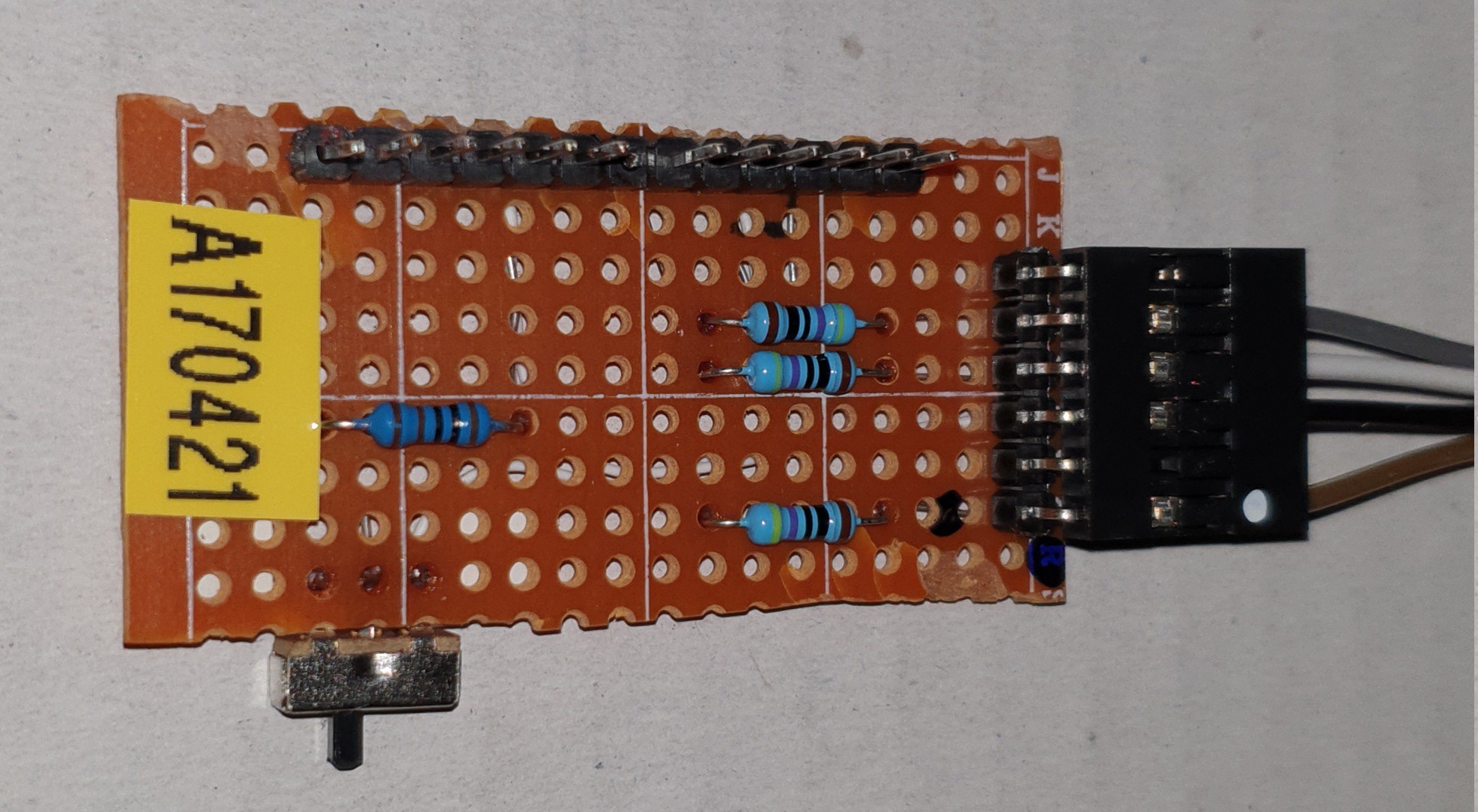
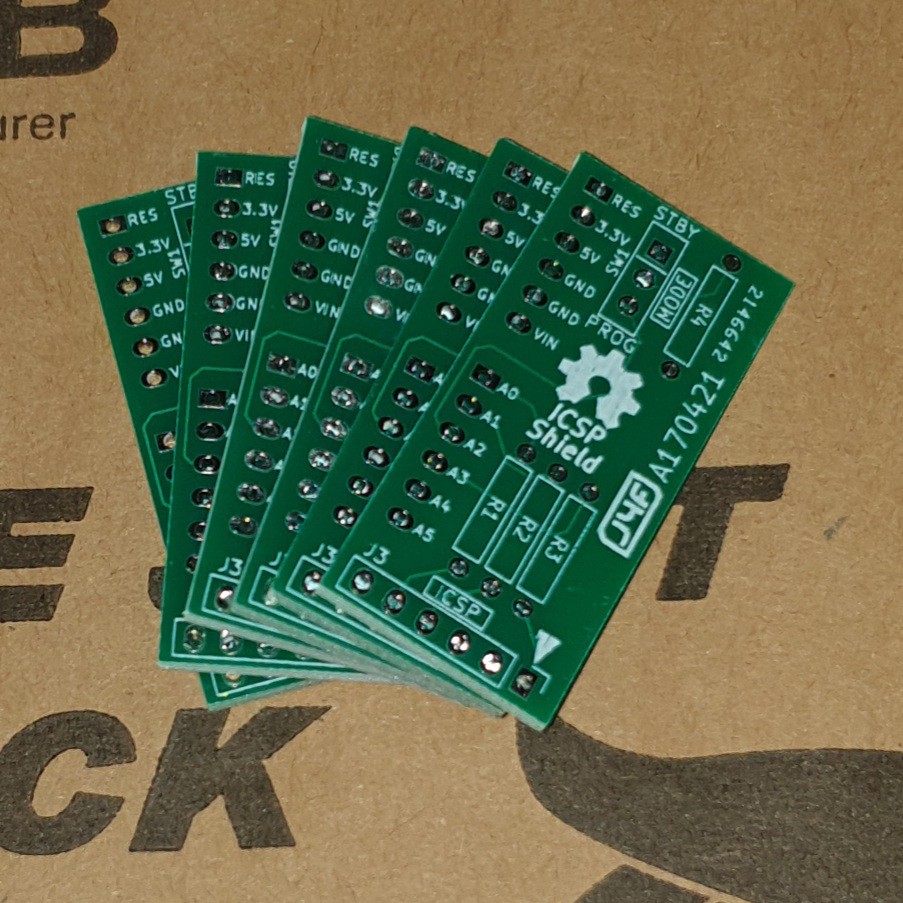
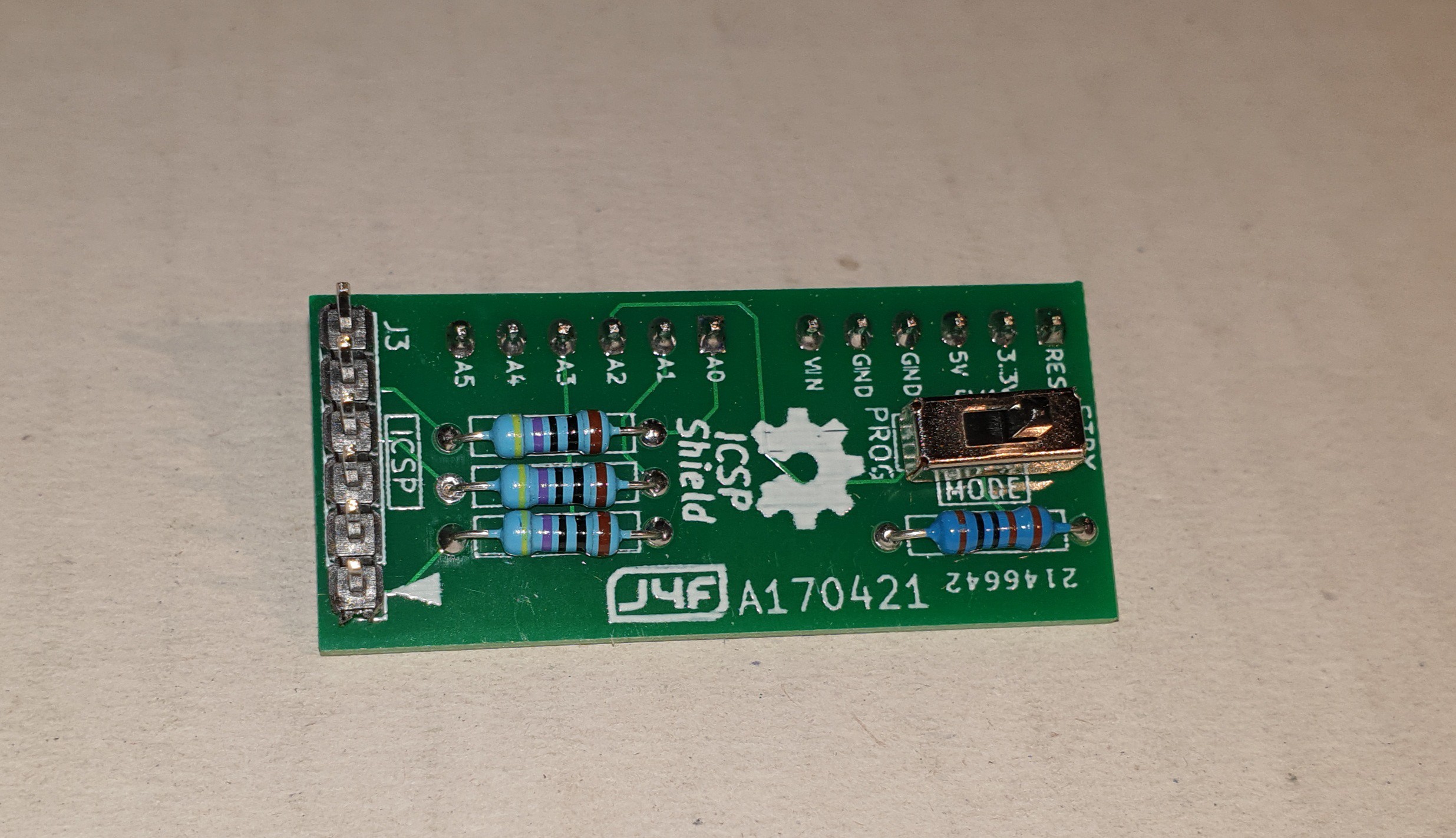
You need to build a very simple "ICSP Shield" (see the A170421 schematic) with a little piece of perfboard to plug on top of the Arduino board and a 4 wire cable with a 6 pin Dupont socket as in the following images (only pin 1, 3, 4 and 5 are connected) for the ICSP connector.
It is strongly recommended that you mark the pin 1 on both sides to avoid errors when connecting it:
Here all the steps to program the PIC MCU. If you are in a linux machine you have to compile pp3.c at first (with the command: gcc -Wall pp3.c -o pp3).
In the following it is assumed that:
- you have already flashed the pp.ino sketch into the Arduino Uno board;
- the "ICSP Shield" (A170421) is plugged on top of the Arduino board with the MODE (SW1) switch set to STBY;
- the file .hex you want write inside the PIC MCU is in the same directory where the "control program" (pp3 for linux or pp3.exe for windows) is.
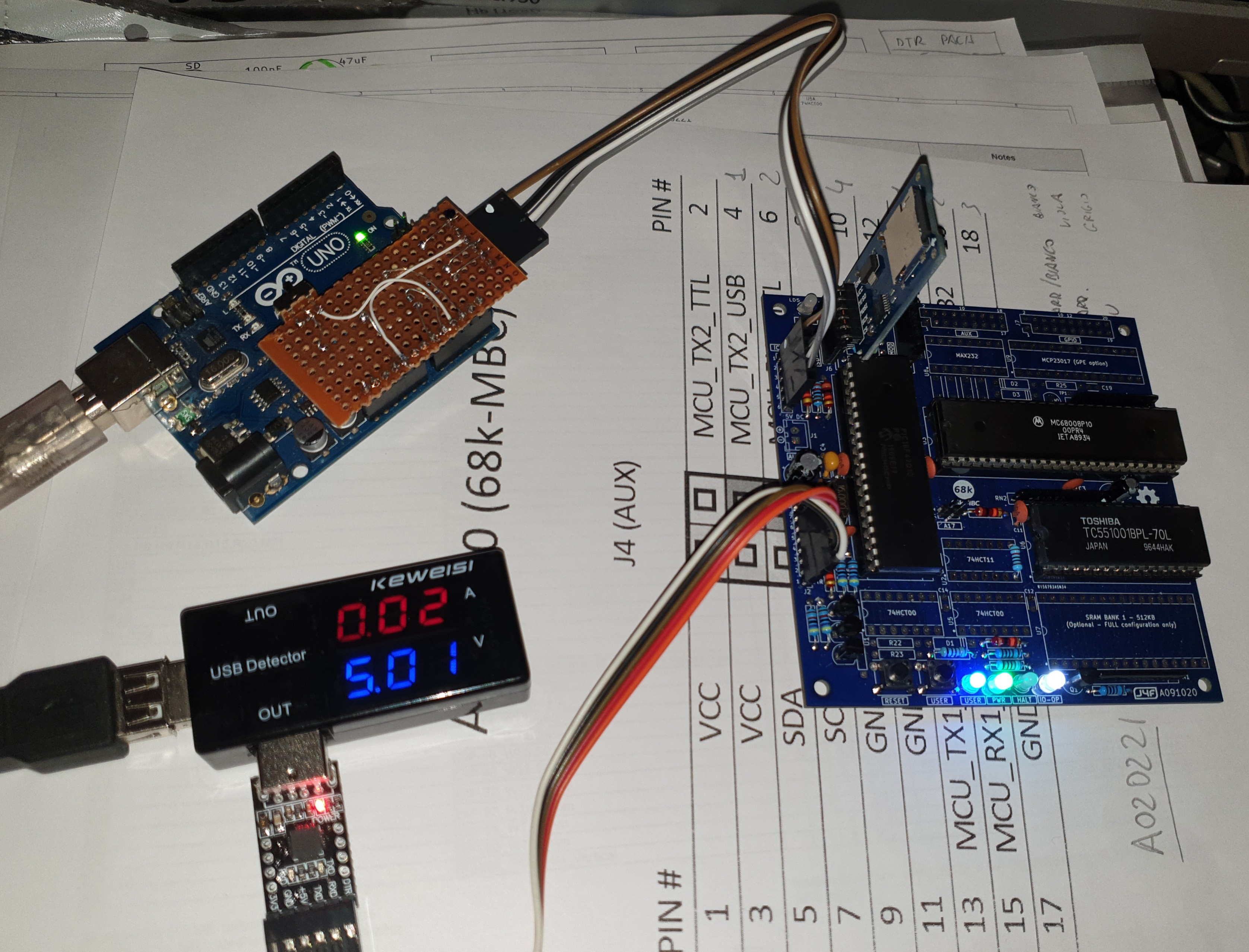
STEP 1: You must connect the Aduino Uno to the USB first (to power it). Verify that the MODE (SW1) switch on the "ICSP Shield" (A170421) is in the STBY position and the led is blinking on the Arduino Uno board. At this point connect it to the 68k-MBC board using the 4 wire cable at the ICSP (J3 ) connector (68k-MBC side). Please note that the 68k-MBC * must * be not powered in this phase.
STEP 2: Now you can power the 68k-MBC board and then set the the MODE (SW1) switch on the "ICSP Shield" (A170421) is in the PROG position. The led on the Arduino Uno board now is turned off.
Please note that in this state the RESET key of the 68k-MBC is disabled and the User key will be seen by the PIC MCU as permanently pressed.
STEP 3: Open a shell from the directory where the .hex file to write and the "control program" (pp3 for linux or pp3.exe for windows) are:
Then check that is all ok with the command (eventually changing the /dev/ttyACM0 serial port name if is different in your system):
./pp3 -c /dev/ttyACM0 -s 1700 -p -n -t 18f47q10

STEP 4: Program the MCU with the command:
./pp3 -c /dev/ttyACM0 -s 1700 -t 18f47q10 S310121.hex
changing S310121.hex with the name of the .hex file to write:
STEP 5: Set the the MODE (SW1) switch on the "ICSP Shield" (A170421) in the STBY position and then press the RESET button on the Arduino Uno board. At this point the led on the Arduino Uno should be blinking again. Now the RESET key of the 68k-MBC works again and you can try to run the 68k-MBC board if you want.
STEP 6: Unpower the 68k-MBC board and then disconnect the cable from the ICSP (J3) connector (68k-MBC side).
STEP 7: Disconnect the Arduino Uno from the USB. All done.
All the needed SW/FW with my changes already applied and the documentation (schematic, BOM, etc.) of the "ICSP Shield" board (A170421) are in the FILES section.
NOTE 1: the Arduino Uno PIC programmer should be able to program more than 400 different PIC devices.
NOTE 2: I've also done a small PCB (18mm x 40mm) for the "ICSP Shield" (A170421) board. The gerber files are inside the same .zip file in the FILES section:
THE SD IMAGE
The content of the microSD (I'll call it simply SD from now) is compressed into a zip file in the Files section.
When you update the IOS firmware you must always update the content of the SD too, as the SD image is normally suited for a given IOS revision.
You have to unzip it retaining the structure of the sub-directories into a FAT formatted SD card, so that the various root files (inside the .zip as the various .DSK files and so on...) are in the root of the SD itself.
IOS supports only FAT16 and FAT32. A 1GB SD is more than enough, anyway because they tends to be difficult to find now a 4GB SD can be a good choice.
About the SD technology, only "legacy" SD (aka SDSC with a capacity up to 2GB) and SDHC cards (2GB - 32GB) can be used. Other most recent types are not supported (so, no SDXC, SDUC,...).
What it really needed to let IOS run are only all the files in the root folder. The other sub-directories contain source files or examples or other kind of content (see next paragraphs).
Inside every sub-directory there is a README.TXT file that may contain important info/updates. Please read them all when you use a SD image first time or when update it!
In the root there is a ChangeLog.txt file with the changes log (related to the SD image content).
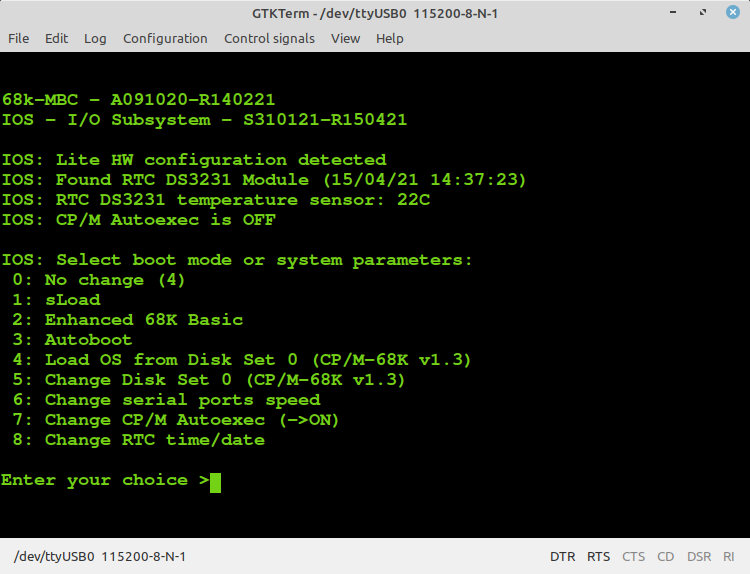
HOW ENTER IN THE "SELECT BOOT MODE OR SYSTEM PARAMETERS" MENU:
To enter in the "Select boot mode or system parameters" you must press the RESET key (SW2), release it and press immediately the USER key (SW1) and keep it pressed until the USER led (LD4) starts to blink.
An other way is to press both keys, release the RESET key holding the USER key down until the USER led starts to blink, or you see the menu on the screen.
Here a screenshot of the menu:
sLoad: loads and executes a Motorola s-record formatted executable sent from the serial port 1. It is the only loading utility embedded into the IOS firmware, so it can be used in a minimal HW configuration without any optional SD or RTC module;
Enhanced 68K Basic: loads and executes a stand-alone Basic interpreter;
Autoboot: loads and executes a 68008 binary file (AUTOBOOT.BIN) on SD.
Load OS from Disk Set <n>: loads and runs an Operative System installed into the current Disk Set <n> on SD.
Change Disk Set <n>: Changes the current Disk Set to another one (only if it is supported more than one Disk Set). This command implements the Multiboot selection and it is used to switch among multiples OS. NOTE: Currently only the Disk Set 0 can be selected.
Change serial ports speed: Changes the speed of the two serial port. The changes will be effective only after the next reboot;
Change CP/M Autoexec: Turns on or off the execution of the AUTOEXEC.SUB batch file at the cold boot of CP/M-68K.
The remaining choices are self-explanatory.
On the current SD image the file AUTOBOOT.BIN is an "Hello World" demo written in 68008 assembly (the source is in the \src folder on the SD).
THE AUTOBOOT BOOT MODE
The Autoboot boot mode allows to load and execute a binary file (AUTOBOOT.BIN) on the root of the SD.
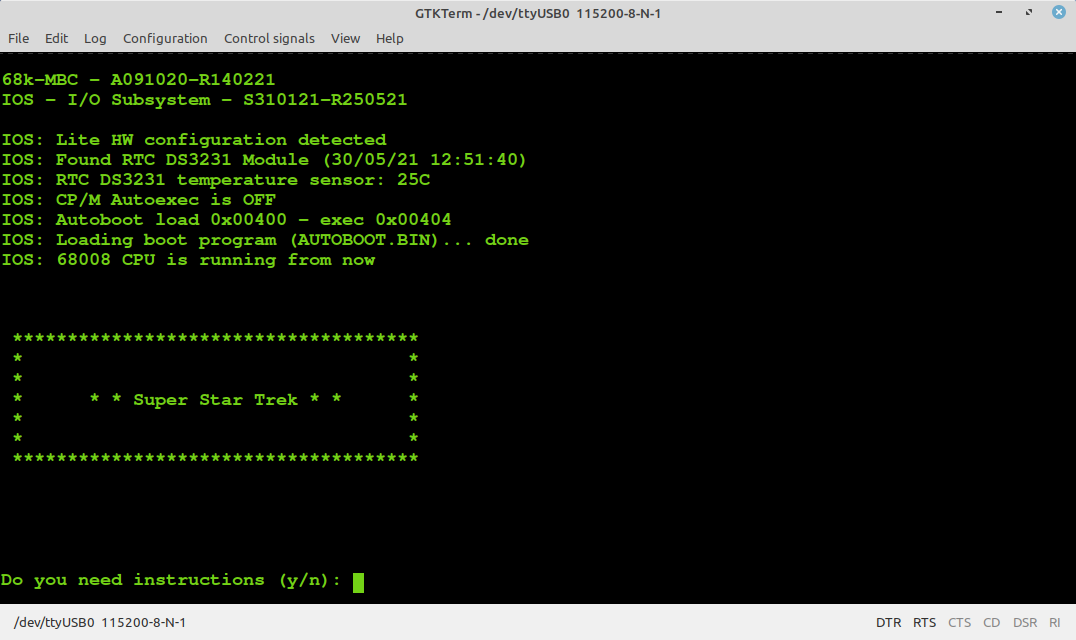
Starting with IOS S310121-R250521 the Autoboot boot mode allows to set custom loading values for the binary executable file AUTOBOOT.BIN.
To set a custom hexadecimal value for both the loading address (the address from which to start loading the binary file) and the execution address (the address to jump to after loading) you have to create a text file AUTOBOOT.ADR on the root of the SD with a single text line containing both the two values separated by a blank.
I.e. on a linux PC to create the AUTOBOOT.ADR file you can use the command:
echo "0x400 0x404" > autoboot.adr
to set the loading address at 0x400 and the execution address at 0x404.
If the AUTOBOOT.ADR file is not found the default values (0x400, 0x400) will be used.
When the Autoboot boot mode is used now both the loading address and the execution address will be displayed as shown in the following screenshot (autoboot.bin generated from the startrek.c source and compiled with the gcc cross-compiler toolchain specifying the needed custom loading parameters in the autoboot.adr file):
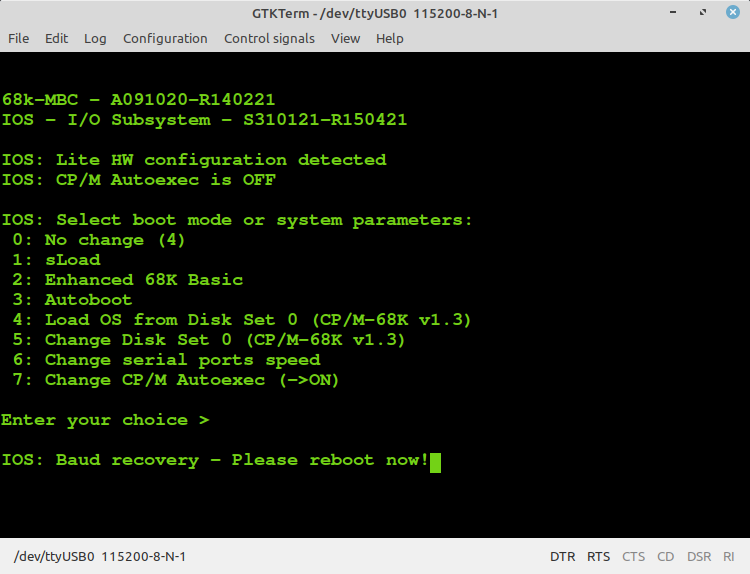
THE BAUD RECOVERY VIRTUAL BUTTON
Changing the speed of the serial ports may happen "to loose" the control of the board (i.e. you forget the speed or set a wrong speed). In this case you can use a "virtual button" to reset both the serial ports to their default speed (115200 bps) without the need of a terminal.
To activate the Baud recovery "virtual button" you have to press both the RESET and USERkey, release the RESET key holding the USER key down until the USER led starts to blink (like for the "Select boot mode or system parameters" menu) and keeping it down at least for 4 seconds more until the USER led starts to blink very quickly. This is the sign that the Baud recovery "virtual button" has been activated.
At the next reboot both the serial ports will be set at the default speed (115200 bps):
NOTE: Starting with IOS S310121-R250521 the behavior of the Baud Recovery virtual button is changed. Now can be triggered only if at least one serial port is set to a not default (115200) value.
CP/M-68K
This is the CP/M-68K v1.3 for the 68000 CPU.
CP/M-68K can run with any supported RAM configuration. I added into the custom Bios a routine to size the installed RAM (128/512/1024KB) and adapt the TPA (Transient Program Area, the user programs space) size accordingly. The detected amount of RAM is printed in the sign-on message:
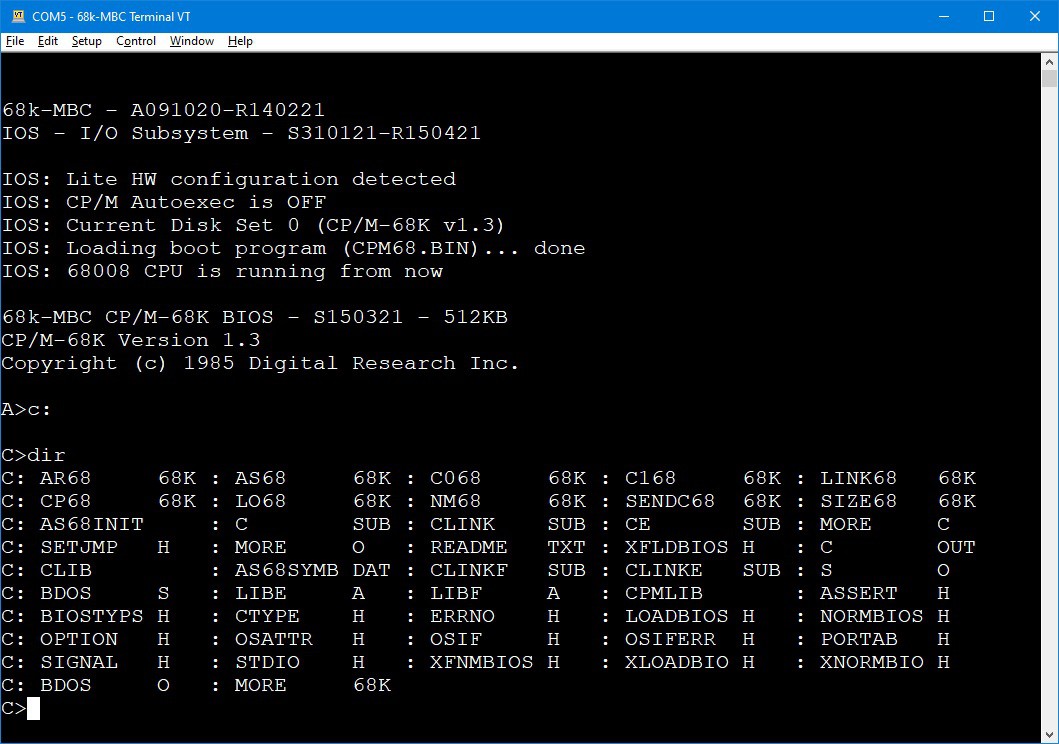
You have 16 8Mbytes disks from A: to P:. The disk A: is the "system" disk and it mainly contains the CP/M external commands.
Other disks (from B: to P:) may contain some SW or be empty. For those containing SW I've added a file (README.TXT) with the name of the SW inside and other information when needed.
If you want to play with both the serial ports virtualized by the IOS, remember that they are mapped as CP/M physical device names accordingly with the following table:
Physical device name | IOS device
------------------------------------------------------+------------------
CRT:, PTR:, PTP: | Serial port 1
TTY:, BAT:, UC1:, UR1:, UR2:, UP1:, UP2:, LPT:, UL1: | Serial port 2
HOW ADD FILES INSIDE A VIRTUAL DISK USING CPMTOOLSGUI
The 68k-MBC maps any disk like A: B: C: etc. into an image file on SD card with this file name: DSxNyy.DSK;
where x (from 0 to 9) is the Disk Set containing an OS:
0 = CP/M-68K v1.3
and yy (from 00 to 15) is the disk (00 = A: 01 = B: etc.).
You can download CpmtoolsGUI (English Windows version) from here.
Extract the file CpmtoolsGUI.exe in a new folder and add/overwrite the file diskdefs copying it from the cpmtools folder inside the SD.
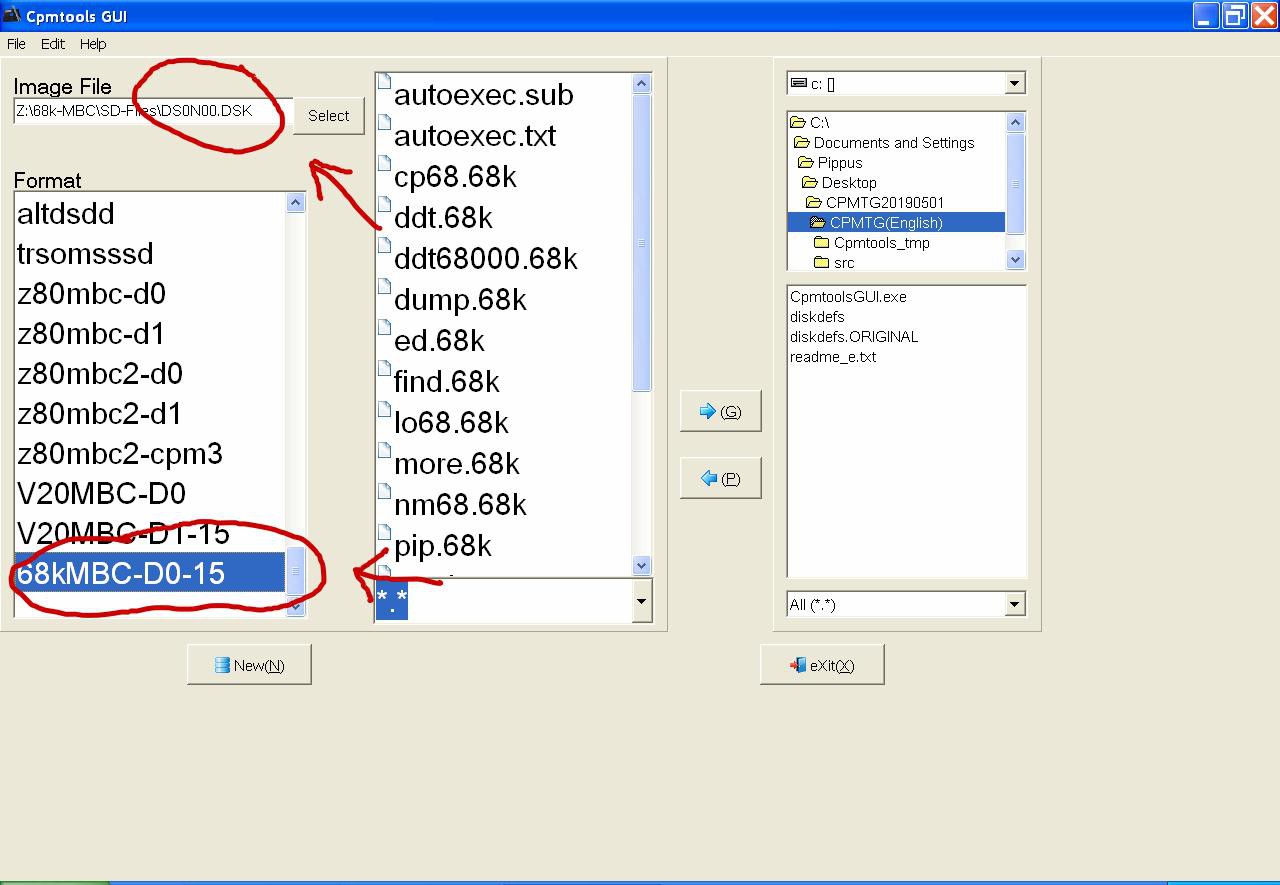
-> STEP 1
Select in the upper left window (Image File) of the CpmtoolsGUI tool the virtual disk where you want to add files.
For CP/M -68K: select "68kMBC-D0-15" for any disk (disk 0 - 15) in the bottom left window (Format) of CpmtoolsGUI.
In the following image is selected (Image File) the disk DS0N00.DSK that corresponds to the disk A: (yy = disk = 00 = A:) of the CP/M-68K OS (x = 0):
-> STEP 2
To add one or more files to the selected virtual disk you have simply point the upper right selection window to the folder where the new files are stored in your PC, select them using the bottom right selection window and press the "<- P" button. After the add you'll see the added file names in the center window (together with the other files previously present).
-> STEP 3
Exit from the the CpmtoolsGUI tool pressing the eXit button.
To extract one or more files from a virtual disk the procedure is the same, just press the "-> G" button instead.
To delete a file inside the virtual disk, select it in the central window, press the right mouse button and select Delete (you can't overwrite a file in the virtual disk, but you have to delete it first).
HOW TO USE SLOAD
When using sLoad to load an executable program in Motorola s-record format from the serial port, remember to set a 15/90ms delay on every transmitted line into the serial port setting of the SW terminal you are using.
In the following image there is the setting window for TeraTerm:
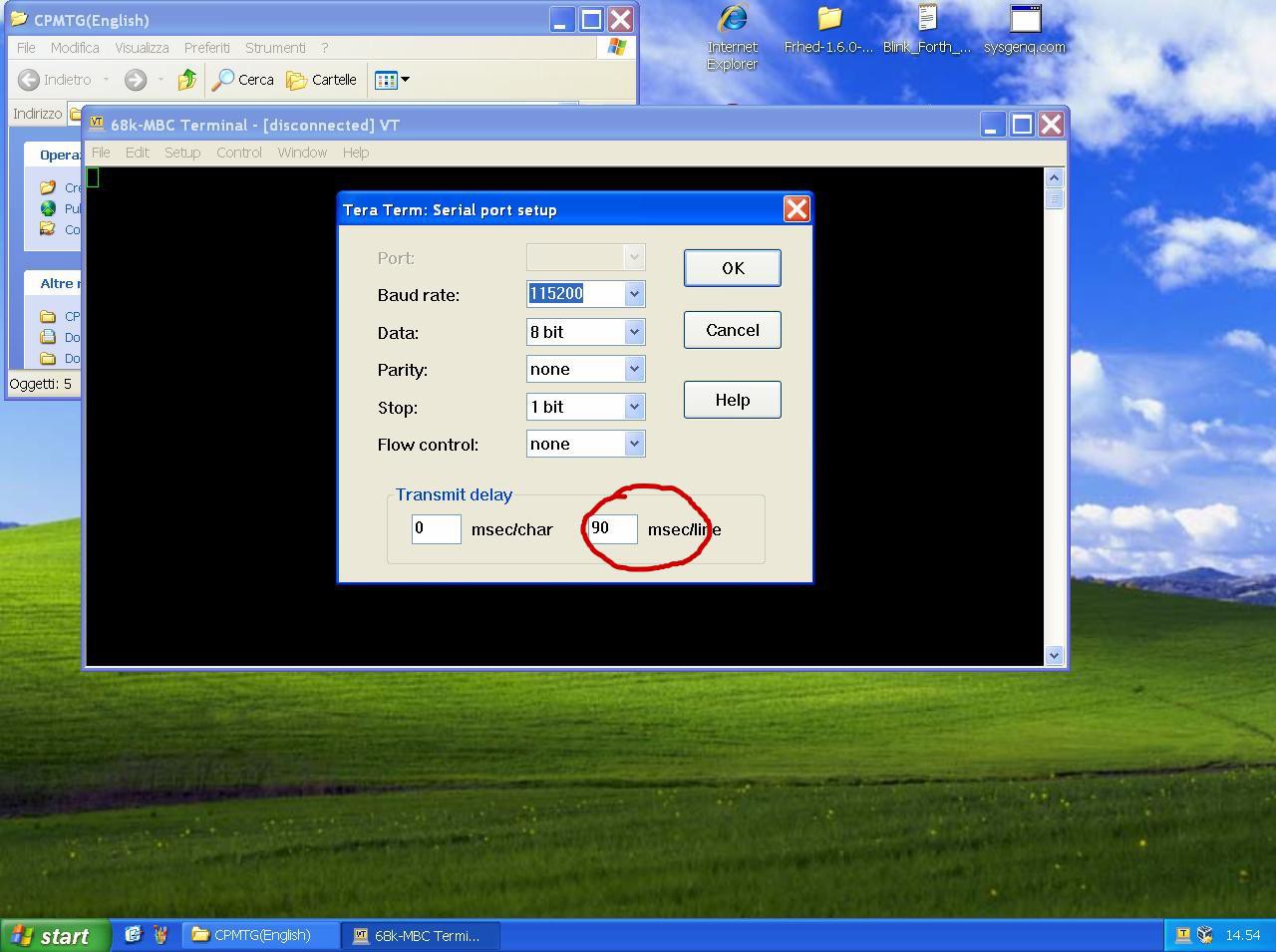
This is required because both the serial ports don't use any handshaking control.
The same is required also when using i.e. the Enhanced 68K Basic and uploading a Basic program.
SLOAD: HOW SETUP A 68008 CROSS-ASSEMBLER AUTOMATED TOOLCHAIN WITH EASY68K (WINDOWS)
Using the sLoad boot mode it is possible setup an automated toolchain to cross-assemble, load and execute on the target (the 68k-MBC) a 68000 assembler source program without physically touch the board (like a "modern" development board), running a single batch file (AL.BAT) from the Windows command-line shell.
To setup an automated toolchain under Windows you have to install Tera Term and the Easy68K assembler at first.
You have to use an USB-serial adapter with the DTR signal as the one described in the HW section, and the driver must be already installed and "linked" to a COMx: port (the DTR signal is used to reset the board from the workstation and start an sLoad load&execute session).
In the \teraterm folder inside the SD image zip file there are the needed files and the detailed instructions in the README.TXT file (remember to modify both the AL.BAT and Load68k.ttl files according to your installation, as explained in the README.TXT file).
I've used this toolchain under Windows 10 and in a Windows XP VM too.
Here a video using the hello_world_demo.X68 source file example (in the \asm_demo directory inside the SD image):
Before to start writing your first program it is probably a good idea to give a look at the "sLoad-S180221.X68" source file (in the \src directory) and read the details about the memory allocation in the comments at the beginning of the file.
Please note that Tera Term resets the 68k-MBC when the macro (Load68k.ttl) is called from AL.BAT. This explains the need of the DTR signal on the USB-serial adapter (it uses the same "trick" to upload an Arduino sketch).
You have to close the Tera Term window to terminate the execution of the AL.BAT batch (before a new run).
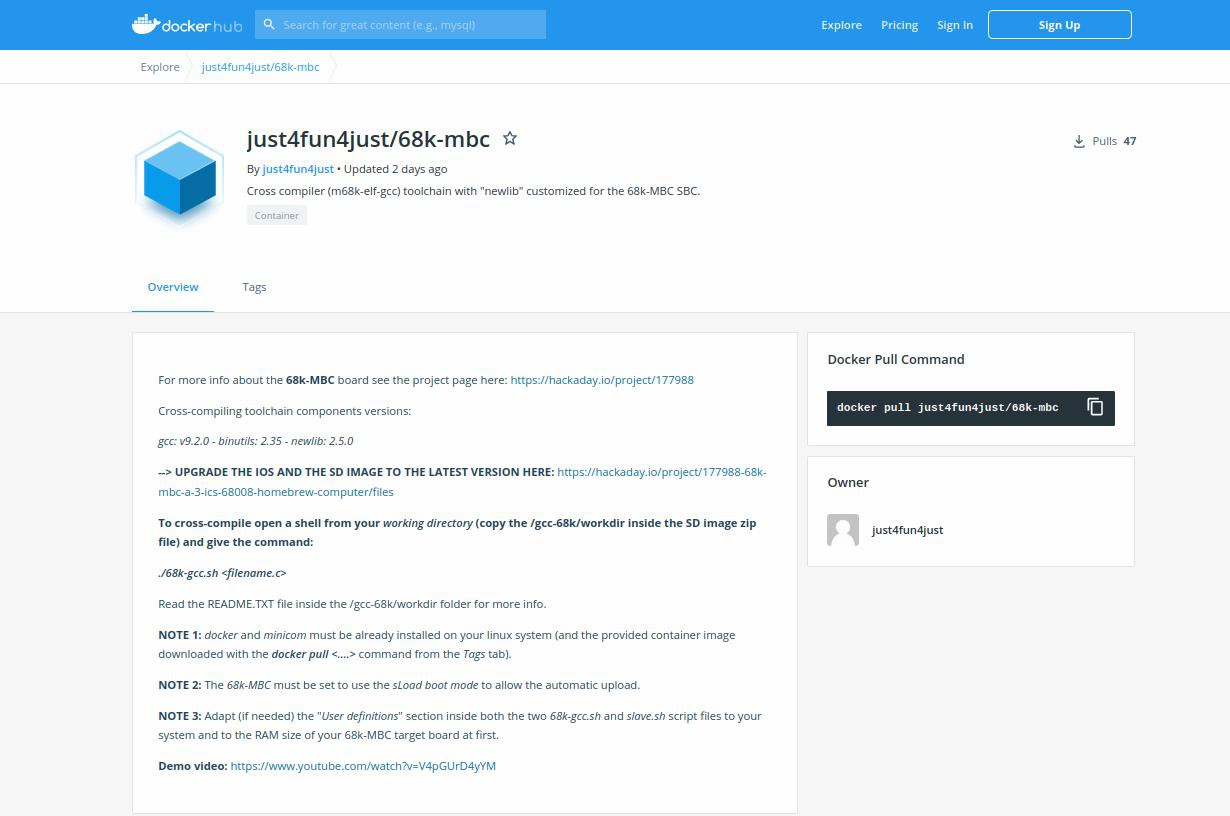
SLOAD: HOW SETUP A "DOCKERIZED" GCC + NEWLIB CROSS-COMPILING AUTOMATED TOOLCHAIN (LINUX)
A "dockerized" ready to use gcc + newlib (standard C library for embedded devices) toolchain with automatic upload customized for the 68k-MBC board can be found here:
https://hub.docker.com/r/just4fun4just/68k-mbc
You have to install docker and minicom in your linux PC to use this docker image to cross-compile with gcc (m68k-elf-gcc) and enable the auto-upload into the 68k-MBC.
Follow the instructions on the 68k-MBC Docker Hub page:
Here an example with the C version of the famous Startrek game:
For more details read the README.TXT file in the /gcc-68k/workdir folder inside the SD image.
NOTE 1: Starting with IOS S310121-R250521 it is possible to use the gcc generated AUTOBOOT.BIN file with the Autoboot boot option (you have to copy the provided AUTOBOOT.ADR file in the /gcc-68k/workdir folder inside the SD image zip file into the root of the SD to enable the execution of any gcc generated AUTOBOOT.BIN binary file).
NOTE 2: the current SD image contains all the needed files to build locally the docker image with the gcc (m68k-elf-gcc) + newlib (standard C library customized for the 68k-MBC) cross-compiler under linux. For more info see the README.TXT file in the /gcc-68k/docker folder inside the SD image.
All the updates and the details to build it (including the firmware for the PIC MCU and the SD image for HD emulation) are in the 68k-MBC page here:
https://hackaday.io/project/177988
68k-MBC: a 3 ICs 68008 homebrew computer
*PCBWay community is a sharing platform. We are not responsible for any design issues and parameter issues (board thickness, surface finish, etc.) you choose.














Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW
ESP32-S3 4.3inch Capacitive Touch Display Development Board, 800×480, 5-point Touch, 32-bit LX7 Dual-core Processor
BUY NOW
Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW
- Comments(0)
- Likes(19)
 Log in to post comments.
Log in to post comments.
- 3 USER VOTES
- YOUR VOTE 0.00 0.00

-
9design
-
8usability
-
9creativity
-
8content

-
10design
-
10usability
-
10creativity
-
10content
-
8design
-
7usability
-
4creativity
-
9content
 More by Just4Fun
More by Just4Fun
-
 Dual channel RS232 adapter
This is a simple board I made to play with my FPGA board "The Thing". This board has two RS-232 chan...
Dual channel RS232 adapter
This is a simple board I made to play with my FPGA board "The Thing". This board has two RS-232 chan...
-
 uCom (a RS232 adapter for the Z80-MBC2)
uCom (micro-Com) is a RS232 adapter for the Z80-MBC2 (https://hackaday.io/project/159973). It has a ...
uCom (a RS232 adapter for the Z80-MBC2)
uCom (micro-Com) is a RS232 adapter for the Z80-MBC2 (https://hackaday.io/project/159973). It has a ...
-
 uTerm (a VT100-like terminal for the Z80-MBC2)
uTerm (micro-Term) is a VT100-like terminal for the Z80-MBC2 (https://hackaday.io/project/159973). I...
uTerm (a VT100-like terminal for the Z80-MBC2)
uTerm (micro-Term) is a VT100-like terminal for the Z80-MBC2 (https://hackaday.io/project/159973). I...
-
 "The Thing": FPGA + STM32, Multicomp compatible
### DESCRIPTIONTwo dev boards into one: a STM32 based Arduino ("Maple Mini" compatible) and a Cyclon...
"The Thing": FPGA + STM32, Multicomp compatible
### DESCRIPTIONTwo dev boards into one: a STM32 based Arduino ("Maple Mini" compatible) and a Cyclon...
-
 ESP-01 NanoBoard (ESP8266)
### DESCRIPTIONThe ESP-01 NanoBoard is a little "motherboard" for the well known ESP-01 ...
ESP-01 NanoBoard (ESP8266)
### DESCRIPTIONThe ESP-01 NanoBoard is a little "motherboard" for the well known ESP-01 ...
-
 Z80-MBC2: 4ICs homemade Z80 computer
### DESCRIPTIONThe Z80-MBC2 is an easy to build Z80 SBC (Single Board Computer with 8MHz Z80, 128kB ...
Z80-MBC2: 4ICs homemade Z80 computer
### DESCRIPTIONThe Z80-MBC2 is an easy to build Z80 SBC (Single Board Computer with 8MHz Z80, 128kB ...
-
 SPP (Standard Parallel Port) Adapter for the 68k-MBC
The Standard Parallel Port (SPP) Adapter board allows to use the GPIO port of the "retro-board" 68k-...
SPP (Standard Parallel Port) Adapter for the 68k-MBC
The Standard Parallel Port (SPP) Adapter board allows to use the GPIO port of the "retro-board" 68k-...
-
 uTerm2-S: a multi-emulation color RS232 terminal
* * HARDWARE OVERVIEW * *The uTerm2-S (micro Term2 stand-alone) is an easy to build multi-emulation ...
uTerm2-S: a multi-emulation color RS232 terminal
* * HARDWARE OVERVIEW * *The uTerm2-S (micro Term2 stand-alone) is an easy to build multi-emulation ...
-
 68k-MBC: a 3 ICs 68008 homebrew computer
* * DESCRIPTION * *The 68k-MBC is an easy to build 68008 CPU SBC (Single Board Computer), using only...
68k-MBC: a 3 ICs 68008 homebrew computer
* * DESCRIPTION * *The 68k-MBC is an easy to build 68008 CPU SBC (Single Board Computer), using only...
-
 Parallel Printer (SPP) Emulator Shield
* * HARDWARE OVERVIEW * *Playing with retro-computers or messing with dated instruments a simple SPP...
Parallel Printer (SPP) Emulator Shield
* * HARDWARE OVERVIEW * *Playing with retro-computers or messing with dated instruments a simple SPP...
-
 Azz!Duino: A W806 (Winner Micro) MCU on a Arduino Mega shaped board
* * OVERVIEW * *The W806 is an interesting low cost MCU made by Winner Micro. There is a page about ...
Azz!Duino: A W806 (Winner Micro) MCU on a Arduino Mega shaped board
* * OVERVIEW * *The W806 is an interesting low cost MCU made by Winner Micro. There is a page about ...
-
 uHat add-on board for uTerm2-S
It is a little add-on board with a PSRAM (specific for the ESP32) and a microSD socket. I've called ...
uHat add-on board for uTerm2-S
It is a little add-on board with a PSRAM (specific for the ESP32) and a microSD socket. I've called ...
-
 PicOne (PIC18F47Q10)
I was searching a DIL MCU for another "project" and found this one that seems interesting. It is che...
PicOne (PIC18F47Q10)
I was searching a DIL MCU for another "project" and found this one that seems interesting. It is che...
-
 V20-MBC: an easy to build 8088 + 8080 computer
DescriptionThe V20-MBC2 is an easy to build V20HL CPU SBC (Single Board Computer). It follows the sa...
V20-MBC: an easy to build 8088 + 8080 computer
DescriptionThe V20-MBC2 is an easy to build V20HL CPU SBC (Single Board Computer). It follows the sa...
-
 CH552 Dragon
* * HARDWARE OVERVIEW * *The CH552 is a little MCU with a 8051 core and a USB interface, and is damn...
CH552 Dragon
* * HARDWARE OVERVIEW * *The CH552 is a little MCU with a 8051 core and a USB interface, and is damn...
-
 ARMando (STM32F030R8 board)
I wanted a board with a "standard" form factor as the common dev boards, but that could be easily in...
ARMando (STM32F030R8 board)
I wanted a board with a "standard" form factor as the common dev boards, but that could be easily in...
-
 RC-Z8BASIC
Never used a Z8 MCU before, but when I found that chip "forgotten" for decades and started to read t...
RC-Z8BASIC
Never used a Z8 MCU before, but when I found that chip "forgotten" for decades and started to read t...
-
 uTerm-S: stand-alone RS232 VT100 terminal with VGA/PS2
* * HARDWARE OVERVIEW * *uTerm-S (micro-Term Stand-alone) is a legacy RS232 VT100-like terminal. It ...
uTerm-S: stand-alone RS232 VT100 terminal with VGA/PS2
* * HARDWARE OVERVIEW * *uTerm-S (micro-Term Stand-alone) is a legacy RS232 VT100-like terminal. It ...
-
Dual channel RS232 adapter
This is a simple board I made to play with my FPGA board "The Thing". This board has two RS-232 chan...
-
uCom (a RS232 adapter for the Z80-MBC2)
uCom (micro-Com) is a RS232 adapter for the Z80-MBC2 (https://hackaday.io/project/159973). It has a ...
-
uTerm (a VT100-like terminal for the Z80-MBC2)
uTerm (micro-Term) is a VT100-like terminal for the Z80-MBC2 (https://hackaday.io/project/159973). I...
-
"The Thing": FPGA + STM32, Multicomp compatible
### DESCRIPTIONTwo dev boards into one: a STM32 based Arduino ("Maple Mini" compatible) and a Cyclon...
-
ESP-01 NanoBoard (ESP8266)
### DESCRIPTIONThe ESP-01 NanoBoard is a little "motherboard" for the well known ESP-01 ...
-
Z80-MBC2: 4ICs homemade Z80 computer
### DESCRIPTIONThe Z80-MBC2 is an easy to build Z80 SBC (Single Board Computer with 8MHz Z80, 128kB ...
-
SPP (Standard Parallel Port) Adapter for the 68k-MBC
The Standard Parallel Port (SPP) Adapter board allows to use the GPIO port of the "retro-board" 68k-...
-
uTerm2-S: a multi-emulation color RS232 terminal
* * HARDWARE OVERVIEW * *The uTerm2-S (micro Term2 stand-alone) is an easy to build multi-emulation ...
-
68k-MBC: a 3 ICs 68008 homebrew computer
* * DESCRIPTION * *The 68k-MBC is an easy to build 68008 CPU SBC (Single Board Computer), using only...
-
Parallel Printer (SPP) Emulator Shield
* * HARDWARE OVERVIEW * *Playing with retro-computers or messing with dated instruments a simple SPP...
-
Azz!Duino: A W806 (Winner Micro) MCU on a Arduino Mega shaped board
* * OVERVIEW * *The W806 is an interesting low cost MCU made by Winner Micro. There is a page about ...
-
uHat add-on board for uTerm2-S
It is a little add-on board with a PSRAM (specific for the ESP32) and a microSD socket. I've called ...
-
-
-
Modifying a Hotplate to a Reflow Solder Station
888 1 5 -
MPL3115A2 Barometric Pressure, Altitude, and Temperature Sensor
457 0 1 -
-
-
V2 Commodore AMIGA USB-C Power Sink Delivery High Efficiency Supply Triple Output 5V ±12V OLED display ATARI compatible shark 100W
1127 4 2 -
How to measure weight with Load Cell and HX711
708 0 3





















